HR20-1700-C10型工业机器人系统通讯设计
2024-06-01

 NQ—I型工业机器人用于平面喷漆的控制
NQ—I型工业机器人用于平面喷漆的控制 NQ—I型工业机器人用于平面喷漆的控制
基于构件的工业机器人测控软件系统的研究 基于模块化的设计思想,对构成工业机器人测控系统的功能模块进行较详细的分析。在此基础上,利用软件构件技术设计了功能模块对应的构件。论述了构件的构造方式以及组合过程,特别是对控制模块相对应的基于基本动作的构件进行较详细的分析。最后,结合实例介绍了该测控系统的应用,并证实了该系统的有效性。
编辑推荐下载
格式:pdf
大小:34KB
页数:3P
人气:86
 4.6
4.6
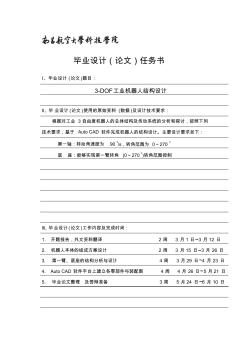
毕业设计(论文)任务书 i、毕业设计(论文)题目: 3-dof工业机器人结构设计 ii、毕业设计(论文)使用的原始资料(数据)及设计技术要求: 根据对工业3自由度机器人的总体结构及传动系统的分析和探讨,按照下列 技术要求,基于autocad软件完成机器人的结构设计。主要设计要求如下: 第一轴:转动角速度为90/s,转角范围为0~270 底座:能够实现第一臂转角(0~270)转角范围控制 iii、毕业设计(论文)工作内容及完成时间: 1.开题报告,外文资料翻译2周3月1日~3月12日 2.机器人本体的组成方案设计2周3月15日~3月26日 3.第一臂、底座的结构分析与设计4周3月29日~4月23日 4.autocad软件平台上建立各零部件与装配图4周4月26日~5月21日
格式:pdf
大小:34KB
页数:3P
人气:86
4.7
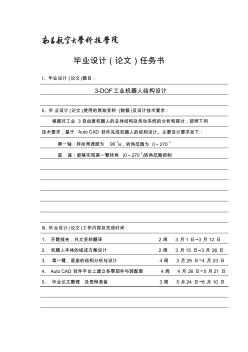
毕业设计(论文)任务书 i、毕业设计(论文)题目: 3-dof工业机器人结构设计 ii、毕业设计(论文)使用的原始资料(数据)及设计技术要求: 根据对工业3自由度机器人的总体结构及传动系统的分析和探讨,按照下列 技术要求,基于autocad软件完成机器人的结构设计。主要设计要求如下: 第一轴:转动角速度为90/s,转角范围为0~270 底座:能够实现第一臂转角(0~270)转角范围控制 iii、毕业设计(论文)工作内容及完成时间: 1.开题报告,外文资料翻译2周3月1日~3月12日 2.机器人本体的组成方案设计2周3月15日~3月26日 3.第一臂、底座的结构分析与设计4周3月29日~4月23日 4.autocad软件平台上建立各零部件与装配图4周4月26日~5月21日
热门文档 HR20-1700-C10型工业机器人系统通讯设计
格式:pdf
大小:3.7MB
页数:48P
人气:86
4.7
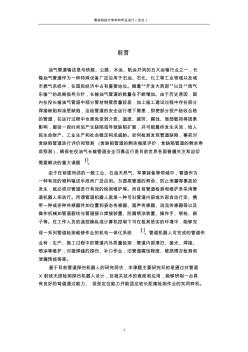
青岛科技大学本科毕业设计(论文) 1 前言 油气管道输送是与铁路、公路、水运、航运并列的五大运输行业之一,长 输油气管道作为一种特殊设备广泛应用于石油、石化、化工等工业领域以及城 市燃气系统中,在国民经济中占有重要地位。随着“开发大西部”以及“西气 东输”的战略指导方针,长输油气管道的数量在不断增加。由于历史原因,国 内在役长输油气管道中部分管材制管质量较差,加上施工建设过程中存在部分 焊接缺陷和涂层缺陷,这给管道的安全运行埋下隐患,即使部分投产验收合格 的管道,在运行过程中也难免受到介质、温度、疲劳、腐蚀、局部载荷等因素 影响,服役一段时间后产生缺陷或导致缺陷扩展,并可能最终发生失效,给人 民生命财产、工业生产和社会稳定构成威胁。如何检测发现管道缺陷,事前对 含缺陷管道进行评价和预测(含缺陷管道的剩余强度评价,含缺陷管道的剩余寿 命预测),确保在役油气长输管道安全可靠运行是目前世界
格式:pdf
大小:79KB
页数:2P
人气:86
4.7
嵌入式清洁机器人系统设计 室内地面清洁是一项枯燥乏味的重复性劳动,传统吸尘器工作时需要人的参与,且操作不便。室内地面清洁机器人将移动机器人技术和吸尘器技术有机地融合起来,结构灵巧,实现了室内环境的自主清洁,是一种环保、健康、智能型的服务机器人,具有广阔的应用前景和市场需求。本设计实现一种全自主清洁机器人,并对路径规划、避障算法、自动充电算法进行研究。

格式:pdf
大小:277KB
页数:未知
人气:86
4.3
工业机器人弹簧式平衡缸的参数研究 工业机器人弹簧式平衡缸是用于平衡重力对机器人ⅱ轴所产生的力矩,平衡缸参数的配置直接影响到对偏重力矩的平衡效果,以及机器人的运动学、动力学特性。因此,对弹簧式平衡缸关键参数的分析研究至关重要。通过对弹簧式平衡缸关键参数的深入研究,获得了关键参数值的大小对平衡效果的影响方式,以一个原有成型的数据进行分析研究,获得了更为合理的参数值,为弹簧式平衡缸的设计提供了理论依据。

精华文档 HR20-1700-C10型工业机器人系统通讯设计
格式:pdf
大小:2.8MB
页数:27P
人气:86
4.3

工业机器人技术专业实训室建设方案 该工业机器人实训体系建设方案是根据目前工业机器人建设的最新要求, 吸收国内外同类建设方案优点,充分考虑学校区域工业机器人发展特点和区域人 才培养的需求,并结合工业机器人教学的特点精心构建而成。 该建设方案集成多种实验实训系统,提供了众多实验例程与典型应用,便 于学生、老师熟悉和掌握工业机器人的实际应用。 为符合学校物工业机人专业的建设目标和要求,实训室方案的丰富建设经 验与优势、以及专业的定制化服务能力,根据学校的需求,特此设计提出了一个 以院校专业学科建设为宗旨的工业机器人应用实训室综合解决方案,方案包含工 业机器人的基础实训室建设和工业机器人典型应用实训室建设。 2实训体系配置及预算 注:本配置表是按照专业建设最全面的设备来配置,仅供参考,我司会根据合作院校的具体 需求来定制化配置或调整。 述特色化专业课程体系完整配套),具体建议如下:(
格式:pdf
大小:939KB
页数:19P
人气:86
4.4

来源网络 工业机器人技术专业实训室建设方案 该工业机器人实训体系建设方案是根据目前工业机器人建设的最新要求,吸收国内外同类建 设方案优点,充分考虑学校区域工业机器人发展特点和区域人才培养的需求,并结合工业机器人 教学的特点精心构建而成。 该建设方案集成多种实验实训系统,提供了众多实验例程与典型应用,便于学生、老师熟悉 和掌握工业机器人的实际应用。 为符合学校物工业机人专业的建设目标和要求,实训室方案的丰富建设经验与优势、以及专 业的定制化服务能力,根据学校的需求,特此设计提出了一个以院校专业学科建设为宗旨的工业机 器人应用实训室综合解决方案,方案包含工业机器人的基础实训室建设和工业机器人典型应用实训 室建设。 来源网络 2实训体系配置及预算 注:本配置表是按照专业建设最全面的设备来配置,仅供参考,我司会根据合作院校的具 体需求来定制化配置或调整。 述特
格式:pdf
大小:97KB
页数:1P
人气:86
4.3
工业机器人用耐扭曲软电缆的开发 介绍了工业机器人用耐扭曲软电缆的特点,研究了产品的关键技术,编制了产品的企业标准,简述了产品的技术和生产现状,试制了样品线,检测了样品性能,申报了产品专利,通过了投产鉴定,综合性能达到国内领先水平。
格式:pdf
大小:63KB
页数:2P
人气:86
4.6
工业机器人安装及调试 工业机器人是广泛用于工业领域的机器人设备,伴随着近些年我国人口老龄化程度的不断加深,青壮年劳动力大幅度缩减,各大工业制造企业出现了用工荒的现象,这使得工业机器人行业的发展迎来了新的春天。本文中笔者将结合自身的实践工作经验,对工业机器人的安装及调试方法做出相关介绍,希望能够进一步扩大工业机器人的应用范围。
格式:pdf
大小:90KB
页数:1P
人气:86
4.3
QZSG-1700/10型干式变压器负载损耗计算 介绍了qzsg-1700/10型干式整流变压器负载损耗的计算方法,并将计算结果与实测数据进行了对比。
最新文档 HR20-1700-C10型工业机器人系统通讯设计
格式:pdf
大小:563KB
页数:6P
人气:86
4.4
光纤激光毛化机器人系统 光纤激光作为第三代激光技术的代表,具有其他激光器无可比拟的技术优越性和广阔的应用发展空间,将会逐步取代全球大部分高功率co2激光器和绝大部分yag激光器。利用光纤激光器的优点,集成开发了第五代全新的光纤激光机器人毛化系统,系统以光纤激光器为载体,协同机器人及其他设备来完成轧辊毛化作业。光纤激光毛化柔性工作站与传统的co2激光毛化设备相比取得了多项重大突破,如系统采用普通机床代替昂贵的磨床实现毛化功能,不仅节约大量的设备投资费用,并大幅度提高生产效率;系统对轧辊旋转时的轴向跳动容忍度大,毛化速度大幅度提高;光纤激光毛化技术可实现毛化点形貌的任意设计以及毛化点的有序、无序排列;毛化成本大幅度降低,没有三废,是一种绿色制造技术。
格式:pdf
大小:9.6MB
页数:67P
人气:86
4.4

.... 参考 .... 参考 华兴鼎盛 工业机器人技术专业创新实验实训 体系建设方案 (高职3年制) (专业代码:560301) 深圳市华兴鼎盛科技有限公司 版本号:v2.0 2016年4月 .... 参考 目录 1方案概述...............................................................4 2实训体系配置及预算......................................................5 3工业机器人实训室详细设计方案.............................................7 3.1微缩机器人实训室..................................................
格式:pdf
大小:4.7MB
页数:54P
人气:86
4.5

工业机器 人 什么是行业研究报告 行业研究是通过深入研究某一行业发展动态、规模结构、竞争格局以及综合 经济信息等,为企业自身发展或行业投资者等相关客户提供重要的参考依据。 企业通常通过自身的营销网络了解到所在行业的微观市场,但微观市场中的 假象经常误导管理者对行业发展全局的判断和把握。一个全面竞争的时代,不但 要了解自己现状,还要了解对手动向,更需要将整个行业系统的运行规律了然于 胸。 行业研究报告的构成 一般来说,行业研究报告的核心内容包括以下五方面: 行业研究的目的及主要任务 行业研究是进行资源整合的前提和基础。 对企业而言,发展战略的制定通常由三部分构成:外部的行业研究、内部的 企业资源评估以及基于两者之上的战略制定和设计。 行业与企业之间的关系是面和点的关系,行业的规模和发展趋势决定了企业 的成长空间;企业的发展永远必须遵循行业的经营特征和规律。 行业研究的主要任
格式:pdf
大小:1.4MB
页数:24P
人气:86
4.5
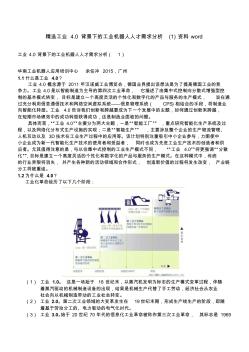
精选工业4.0背景下的工业机器人人才需求分析(1)资料word 工业4.0背景下的工业机器人人才需求分析(1) 华南工业机器人应用培训中心余任冲2015,广州 1.1什么是工业4.0? 工业4.0概念源于2011年汉诺威工业博览会,德国业界提出该想法是为了提高德国工业的竞 争力。工业4.0是以智能制造为主导的第四次工业革命,它描述了由集中式控制向分散式增强型控 制的基本模式转变,目标是建立一个高度灵活的个性化和数字化的产品与服务的生产模式,旨在通 过充分利用信息通信技术和网络空间虚拟系统——信息物理系统(cps)相结合的手段,将制造业 向智能化转型。工业4.0告诉我们创新和跨越要成为下一个发展中的主题,如何通过创新来跨越, 在短期市场绩效中的成功转型获得成功,这是制造业面临的问题。 具体而言,“工业4.0”主要分为两大主题,一是“智能工厂”,
格式:pdf
大小:422KB
页数:4P
人气:86
4.4
第41卷2013年第4期 本 栏 目 编 辑 陆 秋 云 通 用 124 可变径管道机器人系统的 设计与研究 武 燕1,王才东2,王新杰2,牛志军2 1 河南机电职业学院机械工程系 河南郑州 451191 2 郑州轻工业学院机电工程学院 河南郑州 450002 摘要:笔者在分析管道机器人国内外发展现状基础上,针对管道机器人对不同管径需求,提出了一种 双履带式可变径管道机器人的总体方案。设计了机器人的驱动装置、直径调节机构等关键部件,并设 计了机器人的控制系统,该控制系统上采用了上、下位机控制结构,通过手动和自动2种控制模式, 实现机器人无级调速、前进、后退、转弯和图像信息采集等功能。研究结果为可变径管道机器人的实 用化开发奠定了基础。 关键词:管道机器人;变管径;穿缆;控制系统 中图分类号:tp242 文献标志码:a 文章编号:1001-3954
格式:pdf
大小:1.0MB
页数:6P
人气:86
4.8
多孔板微阵列制备机器人系统的设计与研究 设计并研制了一种多孔板微阵列制备机器人系统.该系统机械手采用3自由度移动悬臂式正交结构,利用有限元法对该机械手结构的刚度进行了设计计算.给出了分样头清洗干燥、空气过滤净化、湿度控制的设计方案,建立了控制系统硬件结构和软件功能树.实验结果表明,样机自动化程度高,运行可靠,x、y轴机械手重复定位精度达到±3.6μm和±2.8μm,能满足微阵列制需的生物学应用需求.
格式:pdf
大小:10.0MB
页数:4P
人气:86
4.5
基于分布式结构的图书整理机器人系统设计 针对图书馆图书借阅、上下架和传送整理的智能化需求,设计、开发了一种基于分布式结构的图书整理机器人系统.该系统由循迹移动底盘、图书夹取机械臂和人机交互界面3部分组成.图书整理机器人系统采用plc和单片机作为主控单元,利用超声波传感器和灰度循迹传感器作为障碍检测及巡线定位模块,采用三轴直角坐标运动平台和mg995舵机作为机械臂的三维运动机械臂的驱动装置.通过visu+开发的人机交互界面选取图书信息,可以在无人干预的情况下,实现机器人的巡线定位、超声波避障、自动取/还书籍和实时通信.经过原理样机的搭建和实际测试,验证了系统的可行性和正确性.该系统设计简单、节能环保、自动化执行效率高,能够降低图书馆员的劳动强度,适用于各类大、中、小型图书馆和阅览室,具有广阔的应用空间.
格式:pdf
大小:46KB
页数:7P
人气:86
4.4
第五章数控机床及工业机器人 1、英文名词缩写 英文缩写中文英文全称 nc数控技术numericalcontrol cnc计算机数控computerizednumericalcontrol crt阴极射线管显示器 lcd液晶显示器 cad计算机辅助设计 cam计算机辅助制造 plc可编程控制器 rll阶梯图指令语言relayladderlogic sfc顺序功能图语言sequentialfunctionchart mtbf平均无故障时间用来描述系统的可靠性的指标 mttr平均修复时间 fmc柔性制造单元flexiblemanufacturingcell fms柔性制造系统flexiblemanufacturingsystem cims计算机集成制造系统computerintegratedmanufactu
格式:pdf
大小:1.1MB
页数:3P
人气:86
4.8

工业机器人自动化生产线已成为自动化装备的主流及发展方向。本文介绍了工业机器人自动化生产线的组成和通讯网络构建,详细阐述cclink总线技术中主、从站通讯设计和plc与工业机器人通讯控制。
格式:pdf
大小:147KB
页数:2P
人气:86
4.7
在中国制造2025的社会大潮中,面向智能化发展成为重中之重,这为发展工业机器人技术专业人才培养带来新的机遇和挑战。本文从专业发展的必要性和可行性出发,阐述了对工业机器人技术专业的研究。
文辑创建者
我要分享 >
职位:全过程工程咨询工程师
擅长专业:土建 安装 装饰 市政 园林
相关编辑
文辑推荐
知识推荐
百科推荐