PID控制器在混凝土疲劳试验机电液伺服系统中的应用研究
2025-03-18
分析了公路混凝土疲劳试验机电液伺服系统控制原理,对其系统建立了数学模型。主要借助MATLAB语言详细介绍了PID控制器的设计步骤,提出了其设计方法和需要注意的问题,并通过仿真对加入PID控制器后的系统性能进行了分析,结果表明设计能够使系统满足工作要求。

思明特·济南 压力容器液压疲劳试验机 一、产品简介 压力容器液压疲劳试验机主要用于压力容器的液压疲劳试验,疲劳压力 0-30mpa,可对试验压力,试验温度,试验次数等进行控制,本试验机箱体是 由液压系统和热交换系统,控制仪表等组成的一个有机体。在门都安装闭合检测 开关,进行测量检测,以满足试验安全性。典型应用: 换热器液压疲劳试验 热交换器液压脉冲试验 压力锅疲劳脉冲试验 气瓶疲劳试验 二、控制系统简介 整个控制系统采用工业控制计算机+二次控制仪表系统+传感器开关控制模式, 并对所有的开关量进行闭合plc监控,采用逻辑关系,保证系统的安全和可靠, 能够进行故障记录,自动系统锁定逻辑,保证无人值班的试验安全。 三、特点 1.拆卸被试管路后的泄漏介质自动回收; 2.可存储最近30万次循环的脉冲压力波形。 3.实验数据可回访,可以按照实验时间、实验次数等查询实验结果。 4
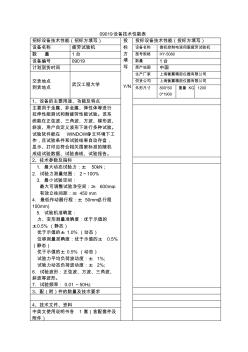
09019设备技术性能表 招标设备技术性能(招标方填写)投 标 方 填 写 y/n 投标设备技术性能(投标方填写) 设备名称疲劳试验机设备名称微机控制电液伺服疲劳试验机 数量1台型号规格hy-5080 设备编号09019数量1台 计划到货时间原产地国中国 交货地点 到货地点 武汉工程大学 生产厂家上海衡翼精密仪器有限公司 供货公司上海衡翼精密仪器有限公司 外形尺寸800*60 0*1900 重量kg1200 1、设备的主要用途、功能及特点 主要用于金属、非金属、弹性体等进行 拉伸性能测试和耐疲劳性能试验。该系 统能在正弦波、三角波、方波、梯形波、 斜波、用户自定义波形下进行多种试验。 试验软件能在windows中文环境下工 作,且试验条件和试验结果自动存盘, 显示、打印应符合相关国家标准的随机 成组试验数据、试验曲线、试验报告。 2、技术参数
编辑推荐下载
格式:pdf
大小:527KB
页数:3P
人气:96
 4.7
4.7
 基于SolidWorks的PTC陶瓷耐压疲劳试验机的设计
基于SolidWorks的PTC陶瓷耐压疲劳试验机的设计 ptc陶瓷耐压疲劳试验机是一台集耐压、电阻及冲击电流测试的多功能设备,能通过更换适配器来快速变线,适应多规格ptc陶瓷产品的疲劳试验。介绍了该设备的设计要求、工作流程,并对该设备局部进行结构及原理分析。
格式:pdf
大小:797KB
页数:4P
人气:96
4.5
无阀电液位置伺服系统的自适应模糊PID控制器设计 针对具有ac伺服电机动态特性的无阀电液位置伺服系统设计了一种能够利用模糊规则动态的修正控制器参数的自适应模糊pid控制器,该控制器是基于常规pid控制器参数和动态性能指标之间的关系,建立了模糊规则表来更新控制器的参数。仿真结果表明了所设计的自适应模糊pid控制器与常规pid控制器相比,能够获得更好的动态特性和对于外部干扰更好的鲁棒性。
热门文档 PID控制器在混凝土疲劳试验机电液伺服系统中的应用研究
格式:pdf
大小:346KB
页数:未知
人气:96
4.7
TNS—WP多工位弹簧扭转疲劳试验机 朋户希望研制一种既能对扭转弹簧的扭并和疲劳性能进行试验,又能对扭转弹簧的力学性能试验,一机多用ri.多工位,提高设备的使用效率的试验机,根据用户的需求,时代试金公司研制了这台集扭转力学性能与疲劳性能试验于一身的试验机。
格式:pdf
大小:110KB
页数:未知
人气:96
4.7
钢丝绳弯曲疲劳试验机探析 按照gb/t12347-1996的试验原理新研制的矿用钢丝绳弯曲疲劳试验机采用液压马达驱动,直接实现1800平面反复弯曲运转,具有通用性较强、频率范围宽、结构简单、自动化程度较高等特点。钢丝绳的连接采用去绳芯加钢棒焊接对接。本文主要探讨钢丝绳弯曲疲劳试验机及其应用。
格式:pdf
大小:706KB
页数:3P
人气:96
4.4
转向阀阀芯疲劳试验机振动台系统设计 建立了电液伺服转向阀阀芯的疲劳试验机振动台的控制模型,以matlab/toolbox为工具,对伺服转向阀的数学模型、传递函数、动态特性进行分析,利用pid控制器,为系统的优化设计、控制调节提供了实用的算法。
格式:pdf
大小:2.3MB
页数:4P
人气:96
4.4
中国是注塑制品生产大国,国内注塑企业广泛使用的传统液压系统式注塑机存在较高的能耗损失。近年来国家高度重视节能减排工作,对国内高能耗企业施行积极的节能政策导向,为推行节能改造提供了良好的环境基础。文章采用电液伺服系统对传统注塑机进行节能改造取得了较好的节能效果,对企业减少成本和节能减排工作具有良好的积极意义。
精华文档 PID控制器在混凝土疲劳试验机电液伺服系统中的应用研究
格式:pdf
大小:561KB
页数:4P
人气:96
4.5
中国是注塑制品生产大国,国内注塑企业广泛使用的传统液压系统式注塑机存在较高的能耗损失.近年来国家高度重视节能减排工作,对国内高能耗企业施行积极的节能政策导向,为推行节能改造提供了良好的环境基础.文章采用电液伺服系统对传统注塑机进行节能改造取得了较好的节能效果,对企业减少成本和节能减排工作具有良好的积极意义.
格式:pdf
大小:422KB
页数:4P
人气:96
4.3
环氧树脂混凝土的疲劳试验研究 环氧树脂混凝土(简称erc)作为一种钢桥面铺装新材料,因环氧树脂胶粘剂有别于沥青结合料,使得erc具备比普通沥青混凝土更优异的力学性能。为了更深入地了解此种材料的性能,在与沥青混凝土对比的基础上,文中着重利用耗散能理论分析了其疲劳性能;最后结合burgers模型阐述了材料粘弹性对耗散能的影响,并提出了相应的控制指标。
格式:pdf
大小:14KB
页数:2P
人气:96
4.4

目录 i 目录 1研究背景与意义...................................................................................................................1 1.1研究背景....................................................................................................................1 1.2高延性纤维混凝土发展史........................................................................................1 1.3国内外研究现状.......................
格式:pdf
大小:5KB
页数:1P
人气:96
4.8
个人收集整理-zq 1/1 一、功能用途 电液伺服动静万能试验机主要用于检测各种材料、零部件、弹性体、橡胶弹性体和减振器地 动、静态力学性能试验.能在正弦波、三角波、方波、梯形波、斜波、用户自定义波形下进 行拉伸、压缩、弯曲、低周和高周疲劳、裂纹扩展、断裂力学试验.资料个人收集整理,勿 做商业用途 试验机操作灵活方便,移动横梁升降、锁紧、试样夹持均由按钮操作完成,采用先进地液压 伺服驱动技术加载、高精度动态负荷传感器和高分辨率磁致伸缩位移传感器测量试件力值和 位移.资料个人收集整理,勿做商业用途 全数字化地测控系统实现力、位移、变形闭环控制,强大地数据处理功能,试验软件在中文 环境下工作,试验条件和试验结果自动存盘,显示和打印.试验过程全部纳入计算机控制, 试验机是科研院所、冶金建筑、国防军工、大专院校、机械制造、交通运输等行业理想地高 性价比地试验系统.
格式:pdf
大小:181KB
页数:未知
人气:96
4.5
基于PID的电液位置伺服系统的设计 本文提出一种基于pid的电液位置伺服系统,介绍了电液位置伺服系统的机构及工作原理,介绍了硬件配置中各个模块的连接方式和作用。
最新文档 PID控制器在混凝土疲劳试验机电液伺服系统中的应用研究
格式:pdf
大小:120KB
页数:2P
人气:96
4.6
电液伺服万能试验机 品牌:上海华龙 产品地:上海 详请了解:021-58597668沈部长或www.***.***/hlcsz1/product127467.html 主要用于金属、非金属和复合材料、构件的拉伸,压缩,弯曲,剪切,剥离,撕裂等力学性能检测。满足 gb、iso、astm、jin等多种试验方法的相关要求。 性能特点: 1.本机具有三闭环功能,即可以进行应力、应变、位移闭环等控制方式,并可以进行无冲击切换。其应力 速度和应变速率完全符合国标gb228-2002等其它金属拉伸试验标准要求。 2.本机是我公司的新一代电液伺服拉伸试验机产品,采用四立柱框架结构,采用双向油缸,在一个空间内 实现拉压双向控制,而且不管是负荷或变形传感器,都具有全程不分档(比分档更为优异,避免了量程转换 时的冲突)的特点。主要表现在:全程具有唯一的一个分辨力。 3.
格式:pdf
大小:86KB
页数:11P
人气:96
4.6

电液伺服万能试验机 electro-hydraulicservouniversaltestingmachines 电液伺服万能试验机 1范围 本标准规定了以液压为力源,采用电子测控技术测量力学性能参数的电液伺服万能试验机的主参 数系列、技术要求、检验方法、检验规则、标志与包装等内容。 本标准适用于金属、非金属材料的拉伸、压缩、弯曲和剪切等力学性能试验用的最大试验力不大 于3000kn的电液伺服万能试验机(以下简称试验机)。 本标准也适用于电液伺服压力试验机。 最大试验力大于3000kn的试验机也可参照使用。 2规范性引用文件 下列文件中的条款通过本标准的引用而成为本标准的条款。凡是注日期的引用文件,其随后所有 的修改单(不包括勘误的内容)或修订版均不适用于本标准,然而,鼓励根据本标准达成协议的各方 研究是否可使用的这些文件的最新版本。凡是不
格式:pdf
大小:24KB
页数:3P
人气:96
4.8
天津市检测技术研究所招标要求 共3页第1页 微机控制电液伺服万能试验机 一、设备名称:微机控制电液伺服万能试验机 二、数量:1台 三、设备功能: 1)金属拉伸试验:满足gb/t228-2002金属拉伸试验规定要求。控制系统具有力控制、变形控制和位移控制三 种试验控制方式,在试验过程中三种控制方式可以按照设定程序平滑切换。软件可以自动求取reh(上屈服强度)、rel(下 屈服强度)、rp0.2(规定非比例延伸强度)、rt0.5(规定总延伸强度)、rm(抗拉强度)、e(弹性模量)等参数。 2)满足gb/t3098.1-2000、gb/t3098.2-2000等标准中对螺栓的抗拉强度试验、楔负荷和保证载荷试验要求。 3)满足结构件的抗滑移性能试验。 4)满足国标的同时能够满足iso、astm、din、jisz等标准的测试程序。 四、设备技术参数: *1、最大
格式:pdf
大小:422KB
页数:3P
人气:96
4.7
PLC中PID控制器在热压机中的应用 针对热压机在热压过程中板材厚度较难控制的问题,采用plc中pid控制器进行解决。介绍了液压系统原理图及pid算法,其次通过大量实验求得pid控制器的最佳参数。实践证明pid参数选择合理,控制方法有效,能满足实际生产需要。
格式:pdf
大小:469KB
页数:8P
人气:96
4.5
第1页共1页 技术方案书 项目:waw-1000c微机控制电液伺服万能试验机 一、简介 waw-1000c型微机控制电液伺服万能试验机主机采用油缸下置式,蜗轮蜗杆传动, 主要用于金属、非金属的拉伸、压缩、弯曲和剪切试验。适用于冶金、建筑、轻工、 航空、航天、材料、大专院校、科研单位等领域。试验操作和数据处理符合gb228-2002 《室温材料金属拉伸试验方法》的要求。 二、主要性能技术指标 1、最大试验力:1000kn; 2、试验力测量范围:20kn-1000kn; 第2页共2页 3、试验力示值精度:±1%; 4、位移测量分辨力:0.01mm; 5、变形测量:标准配置标距50mm,最大变形量10mm. 6、变形测量精度:±0.5% 7、恒力、恒变形、恒位移控制范围:0.4%~100%fs 8、恒力、恒变形、恒位移控制精度
格式:pdf
大小:608KB
页数:3P
人气:96
4.6
积分分离式PID控制在混凝土搅拌站称量系统中的应用 混凝土搅拌站物料称量系统是整个混凝土搅拌站的核心部分,它的精度直接决定了搅拌混凝土的质量。针对传统pid控制存在超调量过大等问题,提出了积分分离式pid控制,并对普通pid控制和积分分离式pid控制分别采用matlab计算机仿真。仿真结果表明积分分离式pid控制能显著降低超调量,提高物料的称量精度,对提高混凝土的搅拌质量具有重要作用。
格式:pdf
大小:565KB
页数:4P
人气:96
4.4
基于模糊PID的电液铣面位置伺服控制器设计研究 以电液伺服阀控制的液压缸为执行机构,阐述了以microchip公司的单片机为主控单元的液压铣面位置控制器的设计,系统硬件由dispic30f6012的16位单片机扩展而成,软件在以往数字pid算法的基础上进行了参数模糊可调化改进。实验研究表明,整个系统较使用传统pid控制时工作更加稳定,有效地抑制了随机干扰以及液压伺服系统的滞环等问题,对调节对象负载变化具有较强的鲁棒性。
格式:pdf
大小:684KB
页数:4P
人气:96
4.5

针对bp神经网络学习过程收敛速度慢及易陷入局部极小值的缺陷,研究了levenberg-marquart算法(即lm算法).为解决lm算法中学习速率的选择和逆矩阵的求解这两个严重影响训练时间和收敛精度的问题,采用lu分解法对lm算法进行改进和优化,并通过matlab语言编程实现,将得到的lmbp神经网络pid控制器应用于暖通空调冷冻水循环的控制回路中,将其控制效果与pid控制算法、bp神经网络pid控制算法进行仿真对比研究.研究结果表明,采用lmbp神经网络pid控制器在减少超调量、加快收敛速度、减少稳态误差等方面的性能都得到了明显的改善.
格式:pdf
大小:1.1MB
页数:4P
人气:96
4.3
基于模糊PID的电液位置伺服控制器设计研究 介绍了电液位置伺服控制系统的组成与工作原理,并建立了系统的数学模型。将模糊控制与pid控制结合在一起,设计了模糊pid控制器,即通过模糊控制器输出对pid参数进行在线调整。利用matlab软件进行仿真,比较常规pid控制与模糊pid控制仿真结果,发现模糊pid控制器提高了系统的动态性能和稳态特性。
格式:pdf
大小:650KB
页数:4P
人气:96
4.6
基于鲁棒PID的电液位置伺服控制器的设计研究 针对电液位置伺服系统存在的参数不确定性的特性,提出了一种利用灵敏度函数来确定鲁棒pid控制器参数的整定方法。这种方法通过对系统开环传递函数奈奎斯特曲线与临界稳定点(-1,j0)点之间距离最大化,来确定各个pid参数。与基于幅值与相角裕度确定的pid控制器进行比较,仿真结果显示,使用灵敏度函数整定出的鲁棒pid控制器,在输入阶跃响应时,控制系统有良好的动态响应性能和鲁棒稳定性能。
文辑创建者
我要分享 >
职位:项目经理施工员
擅长专业:土建 安装 装饰 市政 园林
相关编辑
文辑推荐
知识推荐
百科推荐