变电站智能巡检机器人云台控制系统设计
2025-03-21
云台是变电站智能巡检机器人中的关键组成部分,针对现有云台产品无法满足现场巡检任务要求这一情况,设计了巡检机器人云台控制系统。首先叙述了整个系统的特点和总体设计方案;进而设计了控制系统的硬件和软件,详细描述了硬件系统各模块的功能特点以及系统软件设计过程中系统功能、控制算法和控制软件三个方面的内容;最后通过实验验证了云台控制系统控制精度良好,云台定位准确,能够满足巡检任务的要求。


变电站智能巡检机器人云台控制系统设计
 基于变电站巡检机器人的超声波检测系统的设计与实现
基于变电站巡检机器人的超声波检测系统的设计与实现 本文研究开发了一种基于变电站巡检机器人的多超声传感器采集系统。系统选用一体化超声传感器,以单片机为控制器,设计了超声波的发射和接收电路,完成了与机器人工控机的通信,并完成了相应的软件程序设计。考虑到变电站的强电磁环境对电子设备的干扰影响,在电路设计上采用大量的滤波电路,提高了系统的抗干扰能力,实现了测量的实时性和准确性。变电站环境应用表明:该系统运行稳定,具有较高的测量精度,对变电站巡检器人在变电站中的应用具有重要意义。
编辑推荐下载
格式:pdf
大小:1.5MB
页数:3P
人气:61
 4.6
4.6
变电站自动化控制系统设计与实现 随着自动控制技术的不断发展和电网的不断升级,针对110kv变电站,设计变电站自动化控制系统。介绍系统整体架构、设备配置、功能实现以及防止电磁干扰等。为同类型的设计提供思路。
格式:pdf
大小:578KB
页数:4P
人气:61
4.4
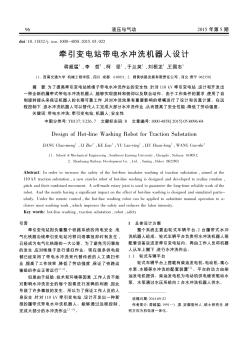
为了提高牵引变电站绝缘子带电水冲洗作业的安全性,针对110kv牵引变电站,设计和开发出一种全新的履带式带电水冲洗机器人,能够实现旋转和俯仰以及联合动作。由于工作条件的要求,使用了自制旋转接头来保证机器人的长期可靠工作,并对冲洗效果有重要影响的喷嘴进行了设计和仿真计算。在远程控制下,该水冲洗机器人可以替代人工完成大部分水冲洗作业,从而提高了安全性能、降低了劳动强度。
热门文档 变电站智能巡检机器人云台控制系统设计

格式:pdf
大小:67KB
页数:1P
人气:61
4.6
近日,山东电力研究院与天津市电力高压供电公司签署了《变电站设备巡检机器人技术协议》和购销合同,变电站设备巡检机器人由此实现了省外市场化销售。
格式:pdf
大小:891KB
页数:4P
人气:61
4.6
基于变电站状态评价的集配型巡检机器人应用研究 为解决多座变电站共用1台机器人的问题,提出基于变电站状态评价动态设置集配型机器人巡检模式.介绍变电站智能机器人巡检系统的结构、机器人的性能需求,分析变电站状态评价标准、变电站状态巡检、机器人巡检模式.通过实际应用对比证明:基于所研究的方法进行应用不仅保证机器人能完成变电站设备巡检任务,还能减轻变电站运维人员的劳动强度、提高工作效率、提升设备检测水平等.
格式:pdf
大小:76KB
页数:1P
人气:61
4.7
我国制造的变电站巡检机器人达国际先进水平 关技术人员正确理解和执行。 2.2.1 使用 主要包括监测装置安装前应该做的准备工作、 监测装置的安装位置、监测装置安装必须遵循的程 序及履行的必要手续、监测装置的保障措施和管理 措施、监测装置的操作与运行步骤以及监测装置退 出运行应采取的措施和技术要求等。 2.2.2 监测装置的检验 a.检验周期的确定 根据河北南网多年来的 运行经验和变电站运行的实际情况,考虑了各种监 测装置制造工艺不同的运行条件,规定:电能质量监 测装置2a要离线检验1次;对工作环境恶劣的监 测装置,必要时可每年1检验次;对于高可靠性且投 入运行年限短的,而现场运行环境条件相对较好的 监测装置,可考虑根据设备状况及制造厂的相关规 定适当延长检验周期,延长时间不超过1a。 b.检验指标的确定 目前网内装设的电能质 量监测装置,既有谐波、电压不平衡度、频率、电压波
格式:pdf
大小:2.1MB
页数:6P
人气:61
4.6

针对现场保护装置压板、二次空气开关和指示灯3个主要反映实际运行状态的基本要素,对变电站巡检机器人室内保护装置巡视功能开展研究.分别提出基于颜色特征对图像识别算法、多特征识别算法和基于灰度处理的图像阈值分割方法,以解决变电站巡检机器人对保护装置识别率低的问题,填补机器人对保护装置巡视技术方面的空白,深化机器人巡视技术的应用,适应未来无人值守变电站的发展要求.
精华文档 变电站智能巡检机器人云台控制系统设计
格式:pdf
大小:408KB
页数:6P
人气:61
4.4
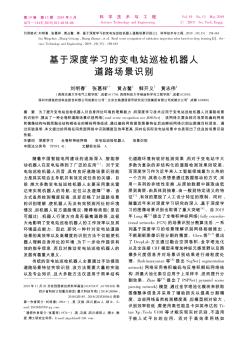
为了提升变电站巡检机器人对自身所处环境的理解能力,将深度学习技术应用于变电站巡检机器人对道路场景的识别中,提出了一种全卷积道路场景识别网络(roadscenerecognitionnet,rsrnet)。该网络主要由相对浅层的编码网络和镜像结构与跳层融合结构相结合的解码网络组成,通过编码网络提取图像特征后由解码网络识别出图像目标信息。通过实验表明,本文提出的网络在同类型网络中识别精度及效率更高,同时在实际变电站场景中也表现出了优良的场景识别性能。
格式:pdf
大小:92KB
页数:1P
人气:61
4.4
变电站设备巡检机器人是山东电力研究院承担的国家“863”计划项目,它可以携带红外热像仪、可见光ccd等有关的电站设备检测装置,以皇主和遥控的方式,代替人对室外高压设备进行巡测,以便及时发现电力设备的内部热缺陷、外部机械或电气问题,给运行人员提供诊断电力设备运行中的事故隐患和故障先兆的有关数据,并具有对设备热缺陷、移动物体闯入等异常情况的自动判断和报警功能。
格式:pdf
大小:581KB
页数:5P
人气:61
4.5
圆弧形腿机构六足机器人的结构和控制系统设计 针对轮式移动机器人越障能力不足的问题,设计出了一种兼具轮式和足式移动机构特点的圆弧腿仿生六足机器人。完成了基于飞思卡尔mc568037型dsp及can总线的机器人控制系统的设计;对机器人的运动步态、静力学及运动学模型进行了研究,并采用adams仿真软件对运动学模型进行了验证;提出了一种基于三角函数规律的电机转速曲线。最后对电机驱动系统、机器人的越障及转向性能进行了测试。实验结果表明,机器人驱动电机的控制系统具有良好的响应特性,机器人可通过30cm高的障碍,并且具有较小的转向半径,环境适应性强。
格式:pdf
大小:1.5MB
页数:4P
人气:61
4.3
变电站智能巡检系统的设计与实现 随着电网技术的不断发展和完善,智能化成为电网技术的发展目标。通过设计一个智能化变电站巡检系统,简化了巡检人员的作业操作任务,使得电力设备巡检更加准确、高效和具有可追溯性。在系统实现中,移动端负责巡检数据的采集、录入和上传,服务端完成数据接收和统计并以可视化展示。该智能巡检系统操作方便快捷,具有较强的实用性。
最新文档 变电站智能巡检机器人云台控制系统设计
格式:pdf
大小:842KB
页数:4P
人气:61
4.5
基于CAN总线的凿岩机器人分布式控制系统设计 分析了凿岩机器人控制系统的构成,针对集中控制方式的缺点,提出了分布式控制系统的方案.分配了can总线智能节点及其功能,设计了适合于凿岩机器人实时性要求的can总线用户协议.提出了各智能节点的通信设计要求,以协调总线上的信息流,减小总线冲突仲裁所需时间.
格式:pdf
大小:63KB
页数:1P
人气:61
4.4
仓库火灾预警机器人—无线数据采集及控制系统设计 近年来,机器人应用范围越来越广泛,已经被用于人类生活的各个领域,而应用移动机器人完成仓库火灾预防工作则是一个新的领域。目前各国在仓库领域应用的火灾防范系统是有线形式,对于有线形式,有很多因素导致信号线老化,影响整个系统的弊端,而无线形式的数据传输对于这些问题的解决有着重大的意义。
格式:pdf
大小:274KB
页数:8P
人气:61
4.6
变电站智能辅助控制系统综述 介绍了华北电网张家口风电检测中心配套110kv变电站智能辅助控制系统的组成结构、系统功能、特点及优势。
格式:pdf
大小:689KB
页数:5P
人气:61
4.5
智能生产辅助控制系统在变电站中的应用 智能电网需求的不断提升和科学技术的日益进步推动了智能变电站的建设,与此同时,智能变电站对于信息高度整合的特点也促进了无人值班运行模式的发展。图像监视、火灾报警、周界安防等变电站辅助系统是保证智能变电站远程监视和控制的基础。对智能变电站辅助系统进行了方案研究,提出可行的辅助系统联动和整合方案,并对辅助系统未来的发展趋势进行了展望。
格式:pdf
大小:50KB
页数:2P
人气:61
4.8
110kV变电站噪音控制系统设计 如今变电站在运行过程中会经常出现噪声问题,这种现象会对周遭环境造成较大的影响。本文主要基于110kv变电站噪音传播的途径及噪音源,并针对实际情况浅谈噪音控制系统的设计。通过有效的噪声控制方案来降低110kv变电站噪音污染。
格式:pdf
大小:544KB
页数:未知
人气:61
4.7
变电站巡检机器人电源监测及控制系统研究 为保证变电站巡检机器人稳定、高效、持续的运行,本文提出一种应用于变电站巡检机器人的电源监测及控制系统,该系统结构紧凑,匹配完善,能满足变电站巡检机器人不同设备对电源的要求,全面监测电池的运行状态,并实现机器人的自动充电。现场工业运行表明,该系统自动化程度较高,交互性好,实用性强,能够满足变电站巡检机器人长期自主运行的功能需求。
格式:pdf
大小:72KB
页数:未知
人气:61
4.7
轨道式变电站巡检机器人投入试运行 一台轨道式巡检机器人日前在辽宁鞍山220千伏王铁变电站投入试运行,其代替人工巡视变电站线路,可节省人力,保障人身安全,并且比其他类型巡检机器人更具稳定性和实用性。
格式:pdf
大小:44KB
页数:1P
人气:61
4.8
南方电网首台自主研发变电站巡检机器人即将量产 近日,广东电网公司电力科学研究院自主研发的变电站巡检机器人通过型式试验,这标志着南方电网首台自主研发的巡检机器人即将量产。广东电网公司将在220千伏变电站全面推广使用巡检机器人。"南网智造"为机器人在电力行业的研究与应用积累了经验、做出了示范,更勾勒出了电力系统人机共融时代的美好图景。"巡检机器人在国内已有近10年的应用实践,但是,技
格式:pdf
大小:76KB
页数:2P
人气:61
4.3
巡检机器人控制系统整体软件设计 在巡检机器人控制系统硬件平台上移植了μc/os-ii嵌入式操作系统;根据该控制系统的实际功能需求,进行了系统主要任务的设计与分配;最后对巡检机器人远程控制平台的显示界面进行了功能性的设计,实现电力隧道巡检机器人远程控制平台与巡检机器人硬件终端的交互功能。
格式:pdf
大小:360KB
页数:未知
人气:61
4.5
卫生洁具施釉机器人手臂控制系统设计 生产应用中,卫生洁具施釉机器人手臂有效提高了卫生洁具陶瓷生产的效率和产品质量,机器人手臂利用压缩空气将釉浆雾化后喷涂在卫生洁具坏体表面,节省了原材料,将代替卫生洁具陶瓷生产过程中以手工施釉为主的操作。卫生洁具生产中施釉工段的工作环境比较恶劣,粉尘和噪声对人体的危害很大,这就客观的要求施釉作业由原来的手工操作转变为机器人手臂操作。
文辑创建者
我要分享 >
职位:内饰结构工程师
擅长专业:土建 安装 装饰 市政 园林
相关编辑
文辑推荐
知识推荐
百科推荐