变电站状态评价的集配型巡检机器人应用研究
2025-01-17
为解决多座变电站共用1台机器人的问题,提出基于变电站状态评价动态设置集配型机器人巡检模式.介绍变电站智能机器人巡检系统的结构、机器人的性能需求,分析变电站状态评价标准、变电站状态巡检、机器人巡检模式.通过实际应用对比证明:基于所研究的方法进行应用不仅保证机器人能完成变电站设备巡检任务,还能减轻变电站运维人员的劳动强度、提高工作效率、提升设备检测水平等.

 轨道式变电站巡检机器人投入试运行
轨道式变电站巡检机器人投入试运行 一台轨道式巡检机器人日前在辽宁鞍山220千伏王铁变电站投入试运行,其代替人工巡视变电站线路,可节省人力,保障人身安全,并且比其他类型巡检机器人更具稳定性和实用性。
变电站巡检机器人电源监测及控制系统研究 为保证变电站巡检机器人稳定、高效、持续的运行,本文提出一种应用于变电站巡检机器人的电源监测及控制系统,该系统结构紧凑,匹配完善,能满足变电站巡检机器人不同设备对电源的要求,全面监测电池的运行状态,并实现机器人的自动充电。现场工业运行表明,该系统自动化程度较高,交互性好,实用性强,能够满足变电站巡检机器人长期自主运行的功能需求。
编辑推荐下载
格式:pdf
大小:546KB
页数:3P
人气:52
 4.4
4.4
基于变电站巡检机器人的超声波检测系统的设计与实现 本文研究开发了一种基于变电站巡检机器人的多超声传感器采集系统。系统选用一体化超声传感器,以单片机为控制器,设计了超声波的发射和接收电路,完成了与机器人工控机的通信,并完成了相应的软件程序设计。考虑到变电站的强电磁环境对电子设备的干扰影响,在电路设计上采用大量的滤波电路,提高了系统的抗干扰能力,实现了测量的实时性和准确性。变电站环境应用表明:该系统运行稳定,具有较高的测量精度,对变电站巡检器人在变电站中的应用具有重要意义。
格式:pdf
大小:2.9MB
页数:5P
人气:52
4.7
变电站智能巡检机器人云台控制系统设计 云台是变电站智能巡检机器人中的关键组成部分,针对现有云台产品无法满足现场巡检任务要求这一情况,设计了巡检机器人云台控制系统。首先叙述了整个系统的特点和总体设计方案;进而设计了控制系统的硬件和软件,详细描述了硬件系统各模块的功能特点以及系统软件设计过程中系统功能、控制算法和控制软件三个方面的内容;最后通过实验验证了云台控制系统控制精度良好,云台定位准确,能够满足巡检任务的要求。
热门文档 变电站状态评价的集配型巡检机器人应用研究

格式:pdf
大小:44KB
页数:1P
人气:52
4.8
南方电网首台自主研发变电站巡检机器人即将量产 近日,广东电网公司电力科学研究院自主研发的变电站巡检机器人通过型式试验,这标志着南方电网首台自主研发的巡检机器人即将量产。广东电网公司将在220千伏变电站全面推广使用巡检机器人。"南网智造"为机器人在电力行业的研究与应用积累了经验、做出了示范,更勾勒出了电力系统人机共融时代的美好图景。"巡检机器人在国内已有近10年的应用实践,但是,技
格式:pdf
大小:120KB
页数:1P
人气:52
4.4
变电站轨道机器人自动测温装置 随着我国经济的快速发展,对供电企业的可靠性要求也日益增强。国家电网公司为了保证设备的安全可靠运行,提出了状态检修。而对运行设备进行在线红外测温,是状态检修的技术保证之一。
格式:pdf
大小:70KB
页数:未知
人气:52
4.5
变电站带电水冲洗移动机器人控制系统的研究 由于变电站设备长期暴露在户外环境中,因而设备的表面会出现工业污秽以及自然污秽的积累。一旦出现污闪问题,将直接威胁到变电站的正常运行。因而,使用带电水冲洗移动机器人进行变电站的冲洗有着重要的意义。本文先对机器人总体设计进行探讨,并进一步研究变电站带电水冲洗移动机器人控制系统的设计。
精华文档 变电站状态评价的集配型巡检机器人应用研究
格式:pdf
大小:2.1MB
页数:6P
人气:52
4.6

针对现场保护装置压板、二次空气开关和指示灯3个主要反映实际运行状态的基本要素,对变电站巡检机器人室内保护装置巡视功能开展研究.分别提出基于颜色特征对图像识别算法、多特征识别算法和基于灰度处理的图像阈值分割方法,以解决变电站巡检机器人对保护装置识别率低的问题,填补机器人对保护装置巡视技术方面的空白,深化机器人巡视技术的应用,适应未来无人值守变电站的发展要求.
格式:pdf
大小:169KB
页数:未知
人气:52
4.7
电缆沟道智能巡检机器人研究 电缆沟道智能巡检机器人研究,是一种基于集成检测和自动控制技术的巡检装置,该装置配置的温湿度传感器、热成像仪、摄像机、微波探伤仪和电源模块等能实现对电缆沟道的温湿度、热分布、空间成像、设备物理缺陷等情况的实时监控,能代替人工高效率高质量的巡检,及时发现电缆沟内的各种安全隐患,防患于未然。
格式:pdf
大小:67KB
页数:1P
人气:52
4.6
近日,山东电力研究院与天津市电力高压供电公司签署了《变电站设备巡检机器人技术协议》和购销合同,变电站设备巡检机器人由此实现了省外市场化销售。
格式:pdf
大小:76KB
页数:1P
人气:52
4.7
我国制造的变电站巡检机器人达国际先进水平 关技术人员正确理解和执行。 2.2.1 使用 主要包括监测装置安装前应该做的准备工作、 监测装置的安装位置、监测装置安装必须遵循的程 序及履行的必要手续、监测装置的保障措施和管理 措施、监测装置的操作与运行步骤以及监测装置退 出运行应采取的措施和技术要求等。 2.2.2 监测装置的检验 a.检验周期的确定 根据河北南网多年来的 运行经验和变电站运行的实际情况,考虑了各种监 测装置制造工艺不同的运行条件,规定:电能质量监 测装置2a要离线检验1次;对工作环境恶劣的监 测装置,必要时可每年1检验次;对于高可靠性且投 入运行年限短的,而现场运行环境条件相对较好的 监测装置,可考虑根据设备状况及制造厂的相关规 定适当延长检验周期,延长时间不超过1a。 b.检验指标的确定 目前网内装设的电能质 量监测装置,既有谐波、电压不平衡度、频率、电压波
格式:pdf
大小:408KB
页数:6P
人气:52
4.4
为了提升变电站巡检机器人对自身所处环境的理解能力,将深度学习技术应用于变电站巡检机器人对道路场景的识别中,提出了一种全卷积道路场景识别网络(roadscenerecognitionnet,rsrnet)。该网络主要由相对浅层的编码网络和镜像结构与跳层融合结构相结合的解码网络组成,通过编码网络提取图像特征后由解码网络识别出图像目标信息。通过实验表明,本文提出的网络在同类型网络中识别精度及效率更高,同时在实际变电站场景中也表现出了优良的场景识别性能。
最新文档 变电站状态评价的集配型巡检机器人应用研究
格式:pdf
大小:92KB
页数:1P
人气:52
4.4
变电站设备巡检机器人是山东电力研究院承担的国家“863”计划项目,它可以携带红外热像仪、可见光ccd等有关的电站设备检测装置,以皇主和遥控的方式,代替人对室外高压设备进行巡测,以便及时发现电力设备的内部热缺陷、外部机械或电气问题,给运行人员提供诊断电力设备运行中的事故隐患和故障先兆的有关数据,并具有对设备热缺陷、移动物体闯入等异常情况的自动判断和报警功能。
格式:pdf
大小:280KB
页数:3P
人气:52
4.7
远程红外热成像检测技术在变电站巡检机器人中的设计与应用研究 本文基于远红外热成像技术原理及远红外热成像在应用领域中的优势,提出变电站远红外热成像巡检机器人的设计思路,借助电力设备检测集控中心数据平台,可快速发现并诊断电力设备故障所在,也可应用于故障隐患预测,从而保障电力设备安全运行。
格式:pdf
大小:578KB
页数:4P
人气:52
4.4
为了提高牵引变电站绝缘子带电水冲洗作业的安全性,针对110kv牵引变电站,设计和开发出一种全新的履带式带电水冲洗机器人,能够实现旋转和俯仰以及联合动作。由于工作条件的要求,使用了自制旋转接头来保证机器人的长期可靠工作,并对冲洗效果有重要影响的喷嘴进行了设计和仿真计算。在远程控制下,该水冲洗机器人可以替代人工完成大部分水冲洗作业,从而提高了安全性能、降低了劳动强度。
格式:pdf
大小:895KB
页数:2P
人气:52
4.7
冲压自动化生产线中工业机器人的应用研究 工业机器人自动化生产线在汽车产业中得到了广泛应用,文章分析了生产线的系统组成及特点,阐述了其总体布置和控制系统工作原理,并对安全和仿真系统做了简要介绍,以期为冲压自动化生产线的设计和运行提供参考和借鉴。
格式:pdf
大小:76KB
页数:2P
人气:52
4.3
巡检机器人控制系统整体软件设计 在巡检机器人控制系统硬件平台上移植了μc/os-ii嵌入式操作系统;根据该控制系统的实际功能需求,进行了系统主要任务的设计与分配;最后对巡检机器人远程控制平台的显示界面进行了功能性的设计,实现电力隧道巡检机器人远程控制平台与巡检机器人硬件终端的交互功能。
格式:pdf
大小:1.4MB
页数:3P
人气:52
4.7
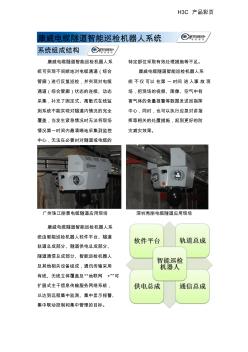
h3c产品彩页 康威电缆隧道智能巡检机器人系 统可实现不间断地对电缆通道(综合 管廊)进行反复巡检,并实现对电缆 通道(综合管廊)状态的连续、动态 采集,补充了固定式、离散式在线监 测系统不能实现对隧道内情况的完全 覆盖,当发生紧急情况时无法将现场 情况第一时间内最清晰地采集到监控 中心,无法在必要时对隧道或电缆的 特定部位采取有效处理措施等不足。 康威电缆隧道智能巡检机器人系 统不仅可以在第一时间进入事故现 场,把现场的视频、图像、空气中有 害气体的含量报警等数据发送回指挥 中心,同时,也可以执行应急对讲指 挥等相关的处置措施,起到更好的防 灾减灾效果。 广州珠江丽景电缆隧道应用现场深圳秀丽电缆隧道应用现场 康威电缆隧道智能巡检机器人系 统由智能巡检机器人软件平台、隧道 轨道总成部分、隧道供电总成部分、 隧道通信总成部分、智能巡检机器人 及其他相关设备组成,通讯传输采用 有线
格式:pdf
大小:547KB
页数:未知
人气:52
4.5
用于机器人螺钉柔性装配的夹持器 从机器人螺钉柔性装配位姿调整策略的需要出发,简要介绍了机器人末端适从方式,提出了基于刚度矩阵的适从表达方案,设计并制作出具有良好适从特性的螺钉柔顺夹持器,实验结果表明,该夹持器所具有的较宽位姿适从范围为机器人螺钉柔性装配的实施打下了良好基础
格式:pdf
大小:584KB
页数:4P
人气:52
4.4
介电型EAP驱动的伸缩移动机器人研究 以介电型eap为驱动材料,设计、制作了一种结构紧凑的圆柱形驱动器。模仿自然界无足爬行生物的运动机理,设计了基于该驱动器的可伸缩移动机器人,实现机器人的向前伸缩运动,验证了该介电型eap驱动器在该类型机器人中的实用性。

格式:pdf
大小:16KB
页数:5P
人气:52
4.8
1焊接机器人的发展历程 自从世界上第一台工业机器人unimate于1959年在美国诞 生以来,机器人的应用和技术发展经历了三个阶段: 第一代是示教再现型机器人。这类机器人操作简单,不具备外界信息的反馈 能力,难以适应工作环境的变化,在现代化工业生产中的应用受到很大限制。 第二代是具有感知能力的机器人。这类机器人对外界环境有一定的感知能 力,具备如听觉、视觉、触觉等功能,工作时借助传感器获得的信息,灵活调整 工作状态,保证在适应环境的情况下完成工作。 第三代是智能型机器人。这类机器人不但具有感觉能力,而且具有独立判断、 行动、记忆、推理和决策的能力,能适应外部对象、环境协调地工作,能完成更 加复杂的动作,还具备故障自我诊断及修复能力。 焊接机器人就是在焊接生产领域代替焊工从事焊接任务的工业机器人。早期 的焊接机器人缺乏“柔性”,焊接路径和焊接参数须根据实际作业条件预先设
文辑创建者
我要分享 >
职位:驻场项目资料员
擅长专业:土建 安装 装饰 市政 园林
相关编辑
文辑推荐
知识推荐
百科推荐