场地分区的机器人足球守门员防守策略设计
2025-03-26
通过对场地分区处理,提出了以小球为中心的守门员积极防守策略.在定义守门员3个属性的基础上,设计了小球在球场中不同区域内时守门员的具体防守策略.该策略针对小球运动的各种情况,及时调整守门员在球门区的位置与姿态,实现守门员的高效防守.实际比赛结果证明了所设计的策略是有效的.

 一种足球机器人场地白线的提取方法
一种足球机器人场地白线的提取方法 基于折反射原理的全景视觉系统,由于能获得大范围视野的环境信息、因其高实时性和高性价比而被广泛应用在视频监控、视频会议和足球机器人等领域。但是,该系统采用的凸面反射镜,由于存在对场景的压缩而使得实际场景中的一些规则物体(比如直线)的成像存在很大的变形,给提取这些特征带来了困难。而足球机器人比赛场景中的白色标志线是不可多得的参考信息,如果能快速准确地提取出全部或部分白色标志线信息,将给机器人的决策系统提供很大的帮助,从而提高机器人的整体性能。以足球机器人比赛环境为背景,将场地白色标志线的边缘像素点转化到:实际距离和图像像素距离成线性变换关系的图像空间,利用一种结合数字罗盘航向角度信息的hough变换方法提取场地白色标志线信息。试验证明该方法具备很大的可行性。
篮球场地的修改对防守技战术的影响 篮球运动是一种对抗性体育运动,流行于美国、中国、菲律宾、立陶宛等国,篮球运动不仅能提高参与者的身体素质、锻炼意志还可以培养培养团队合作意识。中国的篮球运动流行于2003年以后,姚明成为了登录美国职业篮球联赛的中国篮球运动员,越来越多的青少年开始接触篮球,篮球运动开始蓬勃发展。
编辑推荐下载
格式:pdf
大小:136KB
页数:3P
人气:50
 4.7
4.7
小型足球机器人踢球器机电一体化设计 装有踢球器的机器人可以出色地完成机器人足球比赛任务。本文对踢球器的概念设计进行了分析,比较详细地说明了robocup小型足球机器人的具体设计和工作原理。通过机械部分“智能化”的设计,使得踢球器的控制过程简单而有效,具有很强的鲁棒性,较好地适应了整个机器人的性能要求。
格式:pdf
大小:499KB
页数:3P
人气:50
4.5
小型足球机器人踢球器机电一体化设计 装有踢球器的机器人可以出色地完成机器人足球比赛任务。对踢球器的概念设计进行了分析,比较详细地说明了robocup小型足球机器人的具体设计和工作原理。通过机械部分"智能化"的设计,使得踢球器的控制过程简单而有效,具有很强的鲁棒性。较好地适应了整个机器人的性能要求。
热门文档 场地分区的机器人足球守门员防守策略设计
格式:pdf
大小:74KB
页数:1P
人气:50
4.4
痴情的砖石“守门树” 植物可以帮助我们找矿,这已经不算是新闻了。在人类长期的找矿实践中,已经发现剪秋罗属的毛剪秋罗、唇形科蒿莽草属的一种植物唇形科蒿莽草属香薷因为可耐铜,经常长在铜矿附近:澳大利亚的地矿学家在桉树树叶和树枝上发现黄金微粒,结果在它们生长的泥土下面探明了金矿床,这些有着标识意义的植物默默不语,保守着世间宝藏的秘密,等待着人类去探索。
格式:pdf
大小:607KB
页数:4P
人气:50
4.6
中型足球机器人电磁铁式踢球机构的建模与控制 运用机理建模的方法,简化电容和电磁铁的工作模式,建立电磁铁式踢球机构的物理与数学模型。实验表明:该模型能够精准反映机构性能,且控制简单。
格式:pdf
大小:541KB
页数:2P
人气:50
4.5
基于门口检测策略的灭火机器人的设计 依据机器人灭火比赛规则,本文设计基于门口检测策略的灭火机器人,在已有机器人的基础上对各种传感器进行科学布局,实现火源门口检测功能。主要实现了避障、寻火、灭火和回家四个模块。实验表明本文的灭火策略的灭火时间大大缩短。
格式:pdf
大小:443KB
页数:未知
人气:50
4.7
防爆排雷机器人的研究与设计 随着电子技术的飞速发展和嵌入式单片机应用的日新月异,机器人已被广泛应用于工业和农业生产、国防、航天、科研、社会服务等各个方面。在自动控制的嵌入式单片机应用系统中,往往将单片机作为一个核心部件,结合具体的硬件结构,让单片机充分发挥其作用。本防爆排雷机器人电子设计与制作主要是基于32位嵌入式单片机stm32f103c8t6为核心芯片,以嵌入式单片机最小系统为基础,外加bmx-02蓝牙串口通信模块,电机驱动电路l298芯片,稳压电源lm2596和mic5205bm5电路,led发光二极管,前进后退电机,机械手臂电机,开关电路等。使用altium_designer9进行电路原理图和pcb双面板图的设计,利用雕刻机制作出pcb电路板,然后进行电子板元件的焊接安装,利用keiluvision4软件编程和仿真和调试。使用手机蓝牙通信进行遥控,实现防爆排雷机器人(小车)的前进、后退、转弯、抓取拆卸物件等排雷功能。该防爆排雷机器人活动精度高、活动线路灵活,精致小巧,布局美观,成本低廉,实用性强,能够按照要求实现无人接触拆装危险物体。
格式:pdf
大小:74KB
页数:2P
人气:50
4.4
涵道捡乒乓球机器人的设计与实现探究 文章设计了一种自动乒乓球捡球机器人,该机器人采用stm32单片机作为控制系统,利用涵道的高速旋转,使壳体内外产生一定的压强差,将外界的乒乓球压进壳体,实现自动捡球的目的,在装置的最底部安装了可以旋转的拨球装置,尽量的做到整个壳体的密闭性。
精华文档 场地分区的机器人足球守门员防守策略设计
格式:pdf
大小:190KB
页数:3P
人气:50
4.7
一种新型球形机器人的结构设计 针对目前球形机器人存在的结构复杂,控制困难等问题。在基于重心偏摆与力矩复合驱动的原理上,文章设计了一款控制配重块摆动的新型遥控球形机器人,重点分析其运动原理,建立系统的数学模型,并制作了一台样机。实验测试表明:该球形机器人的结构简单,可实现沿任意曲率的曲线运动以及任意转向的控制,且定位性能和复位性能好。
格式:pdf
大小:7KB
页数:2P
人气:50
4.6
1 摘要 首先,本文简述了机器人和移动机器人的概念以及吸尘器机器人的研究意义。然 后,本文对所设计的机器人的控制系统进行了研究,建立了基于双轮独立驱动系统的 数学模型,并确定了控制系统的各个模块。接下来本文重点叙述了控制器模块、传感 器模块和电机驱动模块的设计。对于控制器模块,首先简述了atmege16型微控制 器的性能指标,然后设计了其基本电路。对于传感器模块,首先简述了红外传感器的 性能,然后研究了其在车体上的分布和其本身的硬件结构,最后对红外发射电路和接 收电路进行了设计。对于电动机驱动模块,首先对直流电动机pwm控制进行了研究, 然后设计了电动机的驱动电路,并简述了使用atmege16产生pwm信号的方法。 关键词:移动机器人;atmega16微控制器;红外传感器;直流电动机pwm 控制;l298n。 2 abstract first
格式:pdf
大小:174KB
页数:未知
人气:50
4.7
机器人舵机控制器设计 舵机是一种位置伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。伺服电机是指在伺服系统中控制机械元件运转的发动机,是一种补助马达间接变速装置。在本设计中,我们采用单片机来驱动舵机工作,单片机通过改变输出的pwm信号占空比来控制舵机的转角与转速;舵机能够实现正转、反转、自动旋转等功能;为了更直观地显示转角,我们采用了四位八段数据管用于实时显示。
格式:pdf
大小:457KB
页数:6P
人气:50
4.5

1 机 器 人 实 验 报 告 册 制作人:叶翔徐培嘉陈琳 制作日期:2012年12月 2 目录 1、中国机器人大赛双足竞步机器人比赛规则简述............3 2、双足竞步机器人构成简介.......................3 3、功能及其改进方案简介.........................4 4、设计与制作软件简介...........................4 5、比赛功能简介.................................5 6、制作心得体会.................................6 3 一、中国机器人大赛双足竞步机器人比赛规则简述 1、交叉足印竞步机器人: 结构只有双足、并只能以走路的方式来移动,机器人要分清楚正面及背面, 以箭头方向作为正面,是自主式脱线控制,用
最新文档 场地分区的机器人足球守门员防守策略设计
格式:pdf
大小:289KB
页数:1P
人气:50
4.6
iPad专用机器人支架诞生 美国创业公司doublerobotics开发了一款名为double的机器人。它由一部ipad、一个支架和电动两轮底座组成,支持远程操纵,能实现前进、转弯等动作,可以在公司或家里使用。它能伸展至5英尺高,或折叠至5.6英尺,从而模拟操纵者的站姿或坐姿。doubletelepresencerobot目前售价1999美元,折合人民币约12477元,对于那种公事繁忙,又抽不出身去参加各种会议的大佬们来说,这个东西真的是个不错的贴心宝贝。
格式:pdf
大小:33KB
页数:3P
人气:50
4.7

1 1、工业领域中一般多用6关节型机器人,根据所学内容谈谈 该种机器人都有哪些部件组成,每个部件的工作原理及选择 该部件的依据(800字以上) 目前各大工业机器人厂商提供的六轴关节机器人结构从外观上看大同小异,相差不大,从本 质上来说,其结构应该都是一致的,即其第一关节旋转轴(基座旋转轴)、第四关节旋转轴、 第六关节旋转轴(手腕端部法兰安装盘的旋转中心)在同一个平面内;第二关节旋转轴、第 三关节旋转轴以及第五关节旋转轴互相平行,而且与前面提到到平面垂直;另外,还需要保 证第四关节旋转轴线、第五关节旋转轴线以及第六关节旋转轴线相交于一点。采用该种结构 的工业机器人可以使得其运动学算法最为简单可靠。设计的机器人要保证高的定位精度,就 必须尽可能的满足上述条件,通过机械加工及装配精度来保证最终的机器人运行精度控制在 一定范围内。如果机器人的结构与此差别较大的话
格式:pdf
大小:2.6MB
页数:12P
人气:50
4.4

作图步骤: 1、双击桌面robotstudio5.15图标,如下图所示。 点击左侧选项栏,选择授权。 然后选择激活向导,选择如下: 2、点击创建文件,出现如下界面。 3、选择机器人模型,点击abb模型库,出现如下界面,选择irb2600.把承重能力改为20kg. 4、然后点击导入模型库,下拖选择mytool后,然后把左侧边mytool工具拖到 irb2600-20-165-01,机器人上自动安装了喷头工具。 5、然后点击机器人系统菜单,选择从布局创建系统。 在此项目中,可以在名称处修改系统的名称,尤其在系统多的情况下。在主菜单中,一定要 修改工具,把原始的tool10改为mytool。或者,在放入机器人时,即完成此项设置,可以 不需要修改此项。 一直选择下一个,即可成功。 成功后,屏幕右下角变为绿色。 5、选择建模,在菜单中选择固体,再选择矩形体。
格式:pdf
大小:27KB
页数:4P
人气:50
4.3
灭火机器人 机器人这个概念早已家喻户晓,它是自动执行工作的机器装置,可以协助或者取代人类从 事多种工作。由机器人来代替人类在危险的工作环境中工作,尤其是特殊紧急险情等危害公 共安全时,机器人发挥着越来越重要的作用。本文仅就消防机器人在国内外的发展现状做简 要介绍,并对消防机器人在实际中的应用及改进方向做较为详尽的阐述,供广大同仁参考。 “机器人”一词问世以来,一直成为高科技高尖端的代名词。世界发达国家均在机器人 的研发上投入大量的人力财力。机器人是自动执行工作的机器装置,可以协助或者取代人类 从事多种工作。近年来,机器人已经在很多国家的多个行业逐步代替了手工,是人力资源匮乏 国家解决劳动力问题的上佳选择。而由机器人来代替人类在危险的工作环境中工作,尤其是 危害公共安全的火灾、毒气、爆炸等特殊紧急险情时,机器人发挥着越来越重要的作用。消 防事业直接服务于经济建设,高
格式:pdf
大小:2.1MB
页数:2P
人气:50
4.7
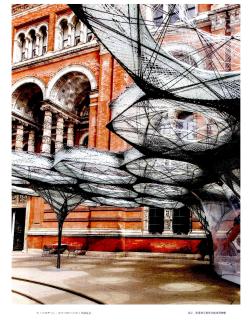
如果机器人生产工艺流行开来、那么诸如“工匠”“手工艺”这样的词汇或许很快就会过时。在伦敦维多利亚和阿尔伯特博物馆外,矗立着一个户外展亭,其结构由斯图加特大学的建筑师和工程师根据甲虫外壳设计,这种外壳韧性超强、重量很轻,具有保护作用。
格式:pdf
大小:252KB
页数:18P
人气:50
4.8

机器人自动火焰切割h型钢的设计 1 目录 目录⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯(1) abstract⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯(2) 第1章工作台的设计院⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯(3) 1.1工作台总体方案⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯(3) 1.2工作台的结构设计⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯(3) 1.3滚珠丝杠螺母副的确定及验算⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯(4) 1.4导轨的选型及计算⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯(6) 1.5推动工件的电机选择⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯(

格式:pdf
大小:547KB
页数:未知
人气:50
4.5
用于机器人螺钉柔性装配的夹持器 从机器人螺钉柔性装配位姿调整策略的需要出发,简要介绍了机器人末端适从方式,提出了基于刚度矩阵的适从表达方案,设计并制作出具有良好适从特性的螺钉柔顺夹持器,实验结果表明,该夹持器所具有的较宽位姿适从范围为机器人螺钉柔性装配的实施打下了良好基础
格式:pdf
大小:94KB
页数:1P
人气:50
4.3
足球场的场地结构设计与施工 本文笔者多年从事参与天津、广东、大连等中国足球联赛比赛场地的设计与施工,并听取场地使用者的意见,不断完善足球场地的设计与施工,总结出实践经验,可供同行有志之士参考借鉴。
格式:pdf
大小:2.7MB
页数:57P
人气:50
4.6
摘要 在微小型履带机器人方面美国走在了世界的前列,代表机器人有 packbot机器人,talon机器人,nugv等。 我国微小型机器人的研究和开发晚于西方的一些发达国家,我国是从 20世纪80年代开始机器人领域的研究的。其中具有代表性的有中国科学 院研制的复合移动机器人“灵晰-b”型排爆机器人,“龙卫士dragonguard x3b反恐机器人”,“jw-901排爆机器人”等。 此设计的目的设计结构新颖,能实现过坑、越障等动作。通过在机器 人机架上加装其他功能的模块来实现不同的使用功能,本研究的意义是为 机器人提供一个动力输出平台,为开发各种功能的机器人提供基础平台。 此设计移动方案的选择是采用了履带式驱动结构。结构整体使用模块 化设计,以便后续拆卸维修,可以适应于各种复杂的路面,并可主动控制 前后两侧摇臂的转动来调节机器人的运动姿态,从而达到辅助过坑、
文辑创建者
我要分享 >
职位:机械工程师
擅长专业:土建 安装 装饰 市政 园林
相关编辑
文辑推荐
知识推荐
百科推荐