常宁农机部门四轮驱动实施万千百十工程
2025-03-21
常宁市农机部门2011年以\"提升农机服务水平和服务能力\"为主题,采取\"四轮驱动\"抓业务、\"四项措施\"抓管理,以实现\"万千百十\"工程目标。①\"万千百十\"目标任务:推广应用各类机具10000台,落实补贴资金1000万元,完

小型四轮驱动翻斗车介绍
 实施“万千百十”工程 培养行业紧缺应用型专门人才
实施“万千百十”工程 培养行业紧缺应用型专门人才 当前我国地方工科院校人才培养中普遍存在着实践教学环节薄弱、工程实践能力不足、人才培养特色缺乏、学生个性发展机制不畅等问题。为了切实解决这些问题,重庆科技学院结合冶金、石油行业急需的应用型高级专门人才的培养目标和培养规格,遵循因材施教原则,认真开展了\"万千百十\"人才培养工程,实施效果较为明显。
编辑推荐下载
格式:pdf
大小:343KB
页数:1P
人气:68
 4.7
4.7
勇猛机械 成功推出四轮驱动玉米收获机 近几年,国家补贴政策和市场需求同时高涨,玉米收获机风生水起,进入黄金时代,自走式玉米收获机逐渐取代背负式玉米收获机成为主流。勇猛机械自主研发的自走式玉米收获机通过多年来的持续改进,得到广大用户的一致好评。勇猛机械聚焦用户需求,在优质产品的基础上对行走系统进行了改进,成功推出一款四轮驱动玉米收获机。四轮驱动的玉米收获机
格式:pdf
大小:52KB
页数:1P
人气:68
4.4
勇猛机械成功推出四轮驱动玉米收获机 近几年,玉米收获机风生水起,国家补贴政策和市场需求同时高涨,玉米收获机进入黄金时代,自走式玉米收获机逐渐取代背负式玉米收获机成为主流。勇猛机械自主研发的自走式玉米收获机通过多年来的持续改进,得到广大用户一致好评。勇猛机械聚焦用户需求,在优质产品基础上对行走系统进行了改进,成功推出一款四轮驱动玉米收获机。四轮驱动的玉米收获机更加适合在较软、较湿的地里作业,在正常情况下,行驶速度提高5%~10%。具体优势表现在以下几方面。(1)玉米收获机四轮驱动系统是在
热门文档 常宁农机部门四轮驱动实施万千百十工程
格式:pdf
大小:88KB
页数:未知
人气:68
4.5
玉米收获机加装四轮驱动装置的特点 我国市场出现的自走式玉米收获机的行走系统大多采用前轮驱动形式。每年的收获季节,个别地区雨水常常偏多,致使联合收割机作业区域的地面湿滑、泥泞,严重影响机器的通过性能。本四轮驱动装置是在中置还田玉米收获机上加装一套后轮驱动装置来完成收割机的四轮驱动。大大的提高了机器的通过性能。从根本上解决了在偏坡地段上收获机推头甩尾现象。可以使收获机在坡路、坑洼、泥泞的路面上行驶作业,提高了收获机的工作效率和收割质量。
格式:pdf
大小:514KB
页数:3P
人气:68
4.4

近年,在新媒体的冲击下,传统报业的广告运营面临着前所未有的困难和挑战。而在所有的目标行业中,房地产行业因其成熟度高、创新能力强、利润相对丰厚,从而成为了新媒体渗透最为广泛和深入的一个行业。在这一背景下,纸媒房地产板块的运营越发显得艰难。与此同时,房地产市场本身也在发生巨大的变化,从之前房子不够卖的卖方时代,迅速向高库存、去化率低的买方时代转变。在销售情况不尽如人意,而销售渠道越来越多元化的今天,开发商往往会选择减少报纸广告,转而采用"小蜜蜂"派发传单、短信促销、微博微信传播、全民经纪等形式来
格式:pdf
大小:614KB
页数:2P
人气:68
4.4
博格华纳四轮驱动扭矩管理系统 用于发动机前置后驱动的四轮驱动扭矩管理系统随着技术的不断进步,分动器从控制方式上可划分为以下两大类:1.被动技术(1)分时分动器(见图2)该种分动器需要驾驶员根据路况和驾驶经验来选择档位模式。在良好路面上,可以不采用分动器而采用后轮驱动模
格式:pdf
大小:535KB
页数:4P
人气:68
4.6
基于主动限滑差速器的ZL50装载机四轮驱动仿真分析 设计了电液式主动限滑差速器及其控制系统,根据zl50装载机四轮驱动系统的特点推导了驱动过程的动力学模型。以增量式pid为控制算法,建立了前后差速器独立控制的整机仿真系统。在非对称路面上的仿真结果表明:电液式主动限滑差速器能够有效限制车轮打滑,提高整机的驱动性能。
格式:pdf
大小:110KB
页数:4P
人气:68
4.3
拖拉机空气调节系统的设计目标就是要使驾驶室内气的温度、湿度和流速等项指标保持在一定的范围内,详细介绍了东方红lf80-90四轮驱动拖拉机驾驶室空调系统的结构和工作原理;通过热负荷的计算,设计并试验验证了该机的空调系统。
精华文档 常宁农机部门四轮驱动实施万千百十工程
格式:pdf
大小:296KB
页数:5P
人气:68
4.4
基于滑转率的四轮驱动拖拉机防滑模糊控制算法仿真研究 根据拖拉机防滑相关知识和模糊控制理论,建立了以滑转率为控制对象的四轮驱动拖拉机防滑控制系统。利用matlab设计了模糊控制器,对其进行仿真。结果显示,基于模糊控制的防滑控制系统可有效抑制驱动轮过度滑转。
格式:pdf
大小:95KB
页数:4P
人气:68
4.4
针对重庆\"大城市带大农村\"经济社会发展特点,汲取国际先进职教理念,历经10年探索实践,选择10大专业试点,以重庆微电园、软件园、车城工业园、现代农业园等15个产值上千亿特色园区为平台,联合百家企业共建,承担9项重大课题,围绕服务城乡统筹办学定位,走工学结合路,系统构建能力标准为核心、模块课程为载体、工学交替为手段、职场鉴定为保障的\"四轮驱动\"人才培养新模式,取得丰硕成果。
格式:pdf
大小:43KB
页数:未知
人气:68
4.5
微型四轮独立驱动电动汽车减震器结构设计 基于四轮独立轮毂电机驱动电动汽车的结构和发展需求,提出一种自供能智能减振器的设计,分析了四轮独立轮毂电机驱动电动汽车的车身受力特点及减震器设计要求,给出了该智能减震器整体设计方案。
格式:pdf
大小:904KB
页数:4P
人气:68
4.4
四轮独立驱动电动车主控制器设计与实现 介绍了基于英飞凌16位微控制器xc164cs的四轮独立驱动电动车主控制器的软硬件设计.实现了基于ackermann和jeantand转向模型的电子差速算法仿真,其仿真结果以及在车辆模型上的运行结果均表明该算法的正确性和合理性,尤其适合于车辆的中低速运行控制.
格式:pdf
大小:367KB
页数:未知
人气:68
4.4
四轮独立转向汽车比例方向阀驱动电路设计 介绍了电液比例方向阀在四轮独立转向中的应用,阐述了其基本工作原理,根据原理进行了控制器的电路设计,最后通过试验论证了这种比例阀控制器的优越性和实用性。
最新文档 常宁农机部门四轮驱动实施万千百十工程
格式:pdf
大小:2.8MB
页数:48P
人气:68
4.7
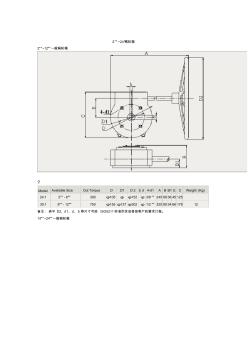
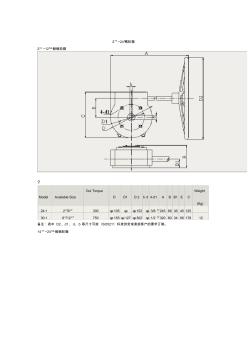
2”~24”蜗轮箱 2“~12”一般蜗轮箱 ? modelavailablesizeouttorquedd1d2bd4-d1abb1ecweight(kg) 24:12″-6″300φ105φφ152φ3/8″245683645125 30:18″-12″750φ155φ127φ302φ1/2″32080346617812 备注:表中d2、d1、d、b等尺寸可按iso5211标准供货或者按客户的要求订做。 14“~24”一般蜗轮箱 ? model available size outtorquedd1d2dbtd1abb1ecweight(kg) 50:114″1200φ170φ127φ305φ1/2″410877820014 80
格式:pdf
大小:658KB
页数:40P
人气:68
4.5

2”~24”蜗轮箱 2“~12”一般蜗轮箱 modelavailablesize outtorque (n.m) dd1d2bd4-d1abb1ec weight (kg) 24:12″-6″300φ105φ76.2φ15211.3φ25.43/8″2456836451254.5 30:18″-12″750φ155φ127φ30219.05φ28.581/2″32080346617812 备注:表中d2、d1、d、b等尺寸可按iso5211标准供货或者按客户的要求订做。 14“~24”一般蜗轮箱 model available size out torque (n.m) dd1d2dbtd1abb1ec weight (kg) 50:114″1200φ1
格式:pdf
大小:2.8MB
页数:49P
人气:68
4.6
2”~24”蜗轮箱 2“~12”一般蜗轮箱 ? modelavailablesize outtorque dd1d2bd4-d1abb1ec weight (kg) 24:12″-6″300φ105φφ152φ3/8″245683645125 30:18″-12″750φ155φ127φ302φ1/2″32080346617812 备注:表中d2、d1、d、b等尺寸可按iso5211标准供货或者按客户的要求订做。 14“~24”一般蜗轮箱 ? modelavailablesize outtorque dd1d2dbtd1abb1ec weight (kg) 50:114″1200φ170φ127φ305φ1/2″41087782001
格式:pdf
大小:2.2MB
页数:2P
人气:68
4.6

1原驱动链轮问题 我公司水泥粉磨系统采用半终粉磨闭路工艺,系统组成为:160-140辊压机+v型静态分级机+预粉磨系统专用分级机+φ4.2m×13m双仓管磨机.系统设计产量180t/h,辊压机配套循环斗式板链提升机,型号为nse1000×43.5,输送能力1000t/h,由驱动链轮带动链斗转动,结构见图1.
格式:pdf
大小:39KB
页数:7P
人气:68
4.3

/*---------------------------------------------------------------------------------------------------- 名称:步进电机四相八拍驱动程序 文件名:steper.c 作者:eastboy e-mail:eastboy_007@163.com 日期:2008年7月16日 版本:1.0 申明:按键部分程序参考了raosibin的4×4按键状态机思想程序 说明: 1.可通过按键选择正转或反转,碰到限位开关后自动微调上一次微调值后停止; 2.可通过按键微调,即低速转动,以便精确调整位置; 3.仿真时通过两个按钮模拟前后限位开关,以模拟实际生活当中步进电机带轴运动时部 件的前后电限位, 程序并可自动记住以前后限位开关为基点的微调步数; 4.本程序只是通过了软件功能仿真
格式:pdf
大小:315KB
页数:2P
人气:68
4.7
成功实施安居工程 造福万千百姓 徐州市是全国首批实施安居工程的59个城市之一,同时也是建设部12个建设试点城市之一.首期实施的“西苑民乐园”安居工程,从95年7月16日开工至96年元月23日全面竣工,仅用193天时间,比国家定额工期730天大大超前.25幢住宅楼中有11幢被评为优良工程,优良率达到44%,并且实现了“当年开工、当年竣工、当年上房、当年见效益”的目标.该小区在实施过程中,建设部及江苏省有关领导多次视察指导,并将其作为示范小区接受各开发建设单位的参观学习,大家一致认为是目前徐州市“速度最快、质量最好、配套最全、环境最美”的住宅小区.我们认为以下几条经验值得总结推广.
格式:pdf
大小:380KB
页数:5P
人气:68
4.6
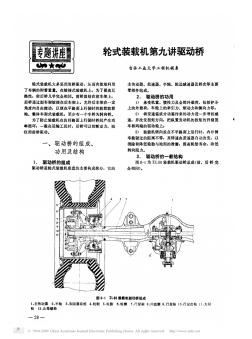
工程机械驱动桥准双曲面齿轮的优化选型设计 开发了工程机械驱动桥弧齿准双曲面齿轮优化选型设计系统,按多目标问题的最优化设计方法建立了基本参数的优化设计数学模型,编制了相应的设计程序;通过现场实际使用,取得了良好的效果。
格式:pdf
大小:158KB
页数:12P
人气:68
4.4
曳引驱动与强制驱动电梯 报告编号: 电梯定期检验自检报告 使用单位 注册代码 设备型式 维保单位 自检日期 (电梯维保单位印制) 注意事项 1.本报告依据《电梯监督检验和定期检验规则——曳引与强制驱动电梯》 (tsgt7001—2009)及第1号修改单、《电梯使用管理与维护保养规则》(tsg t5001-2009)制定,适用于电梯定期的自行检验,无机房和有机房电梯请自行 对照相应的项目。 2.本报告应当由计算机打印输出,或者用钢笔、签字笔填写,字迹应当工 整。各项记录内容出现错误时应划改,不可涂擦,以免字迹模糊或消失,并将 正确内容填写在其旁边,在正确内容附近加盖更改章或检验人员签字。 3.本报告无自检人员、批准人员签字、维保单位的许可证编号和检验专用 章或者公章无效。 4.自检过程中,自检人员应当认真审查相关文件、资料,将检验情况如实

文辑创建者
我要分享 >
职位:工业与民用建筑机械员
擅长专业:土建 安装 装饰 市政 园林
相关编辑
文辑推荐
知识推荐
百科推荐