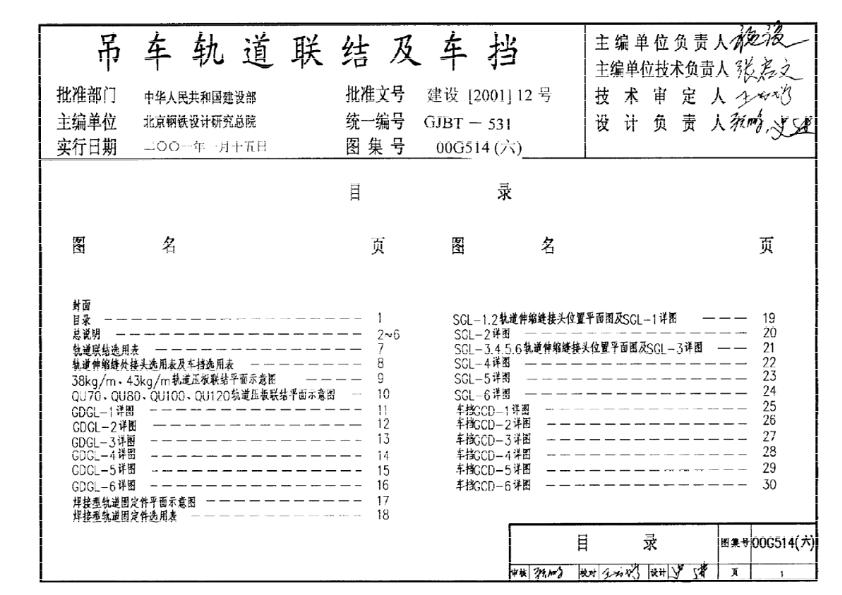
吊车轨道连接及车档
2025-03-22

00G514吊车轨道连接及车档图集

分包项目经理 检 控 序 号 1 应符合设计要求 和现行有关标准 规定,无因运输 、堆放和吊装等 造成变形及涂层 脱落(或已矫正和 2 不应少于70%紧 贴, 且边缘最大间隙 不应大于0.8mm 0. 3 0. 6 0. 1 0. 4 0. 5 0. 3 0. 2 0. 4 0. 7 0. 7 1 主要构件的中心 线及标高基准点 等标记应齐全 2≤5.03125004323 3±10.02-3678-45670 4≤h2/500 ≤10.020286951048 ≤15.012514156731479 6不大于l3/1500, 且不大于5.0mm 1253501312 7≤3.02311110022 8≤5.05402544325
编辑推荐下载
格式:pdf
大小:43KB
页数:1P
人气:101
 4.7
4.7
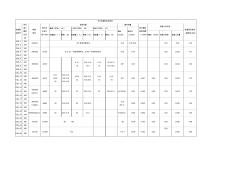
吊车轨道联结选用表 轨道联 结型号 吊车 梁上 螺栓 孔间 距 钢轨 型号 最大轮 压设计 值p(kn) 适用范围钢材用量 复合像胶 垫板用量 (kg/m) 混凝士找平层 轨道面至梁顶 面距离(mm) 重级工作制(a6)中级工作制(a6)轻级工作制(a3) 钢轨 (kg/m) 联结件 (kg/m)起重量(t)跨度(m)起重量(t)跨度(m)起重量(t)跨度(m)钢筋(kg/m)混凝土等级混凝土用量 dgl-1220 24kg/m<5t电动单梁吊车24.55.31/5.49c300.02-145 dgl-2240 dgl-3220 24kg/m≤1905-12.5t电动单梁吊车,5-20t手动桥式吊车24.55.44c300.023-137dgl-4240 dgl-5260 dg
格式:pdf
大小:183KB
页数:3P
人气:101
4.5
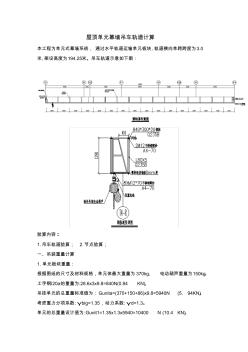
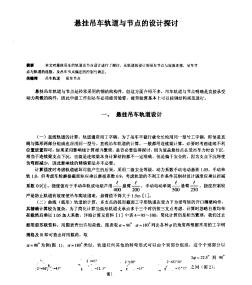
屋顶单元幕墙吊车轨道计算 本工程为单元式幕墙系统,通过水平轨道运输单元板块,轨道横向单跨跨度为3.0 米,架设高度为194.25米。吊车轨道示意如下图: 验算内容: 1.吊车轨道验算;2.节点验算; 一、吊装重量计算 1.单元板块重量: 根据图纸的尺寸及材料规格,单元体最大重量为370kg,电动葫芦重量为150kg。 工字钢i20a的重量为:28.6x3x9.8=840n(0.84kn)。 吊挂单元的总重量标准值为:gunita=(370+150+86)x9.8=5940n(5.94kn)。 考虑重力分项系数:γbig=1.35,动力系数:γd=1.3。 单元的总重量设计值为:gunit1=1.35x1.3x5940=10400n(10.4kn)。 二、荷载分布 状况一:电动葫芦作用在支座节点上(对支座最不利)。 状况二:电动葫芦作用在轨道中心处(对轨道最不利)。
热门文档 吊车轨道连接及车档
格式:pdf
大小:48KB
页数:9P
人气:101
4.5

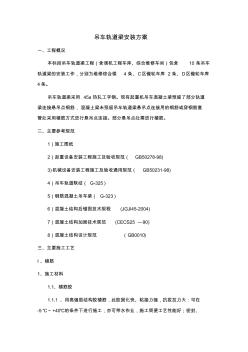
吊车轨道维修 抚矿机械制造厂吊车轨道维修 施工安全技术措施 一、工程概况: 本工程座落在抚矿机械制造厂院内,铸工厂房车间南跨北侧吊车 轨道由于轨道压板连接螺栓年久腐蚀严重,造成吊车轨道位移严重, 影响吊车安全使用,需要对轨道进行加固调整。加固施工主要有: 1、厂房南跨北侧吊车梁中间部分8跨(48m)吊车梁轨道用钢板抱柱 加固。 2、吊车轨道梁总长160,除去中间8跨,其余112m部分吊车梁轨道 加固采用钻孔植筋,植筋采用φ16螺栓,钻孔φ22深度为120mm, 共计400个孔。 由于施工在8m高的吊车梁上作业,为保证工程施工安全进行, 特编制此施工措施。 二、施工准备: 1、在吊车梁上施工时应与甲方及时沟通,应保证施工时吊车滑触线 等用电设施停电。 2、为了及时的维修完毕,在施工前应将所需材料、零部件等进场, 人员、机具等提前做好准备。 3、准备3分钢丝绳160
格式:pdf
大小:55KB
页数:5P
人气:101
4.8
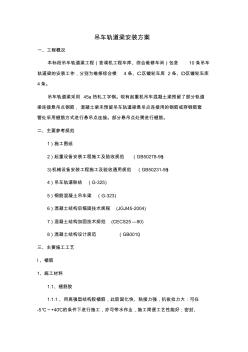
吊车轨道焊接工艺 1编制说明 本焊接工艺是根据《建筑钢结构焊接技术规程》(jgj81-2002)、 《吊车轨道联结及车挡》(00g514〔六〕)、《吊车轨道焊接工艺评定 指导书》、《焊接工艺评定报告》编制而成。 2适用范围 本工艺适用于qu80-120轨道的焊接。 3轨道接头的焊接 3.1母材 吊车轨道用钢轨是一种特种截面钢轨,是采用镇静钢冶炼的低 合金钢,其牌号为u71mn,其化学成分和机械性能如下表所示: 牌号 化学成分%机械性能 csimnps抗拉强度 u71mn0.65~0.770.15~0.351.1~1.5≤0.04≤0.04≥885mpa 3.2焊缝接头形式 轨道接头为对接 直i型,间隙为16~ 18mm,形式如右图所 示: 3.3焊接方法 焊接方法选用手 工电弧焊。 轨道组对示意 轨道 紫铜板×× 钢板××(5-10) 吊车梁
格式:pdf
大小:1.4MB
页数:6P
人气:101
3
悬挂吊车轨道与节点的设计探讨——本文对悬挂吊车的轨道及节点设计进行了探讨,从轨道的设计到吊车节点与屋盖连接,吊车节点与轨道的连接,及吊车节点偏差的控制与调正。
格式:pdf
大小:170KB
页数:8P
人气:101
4.7
吊车轨道梁安装方案 一、工程概况 本标段吊车轨道梁工程(含调机工程车库、综合维修车间)包含10条吊车 轨道梁的安装工作,分别为维修综合楼4条、c区镟轮车库2条、d区镟轮车库 4条。 吊车轨道梁采用45a热轧工字钢。现有起重机吊车混凝土梁预留了部分轨道 梁连接悬吊点钢筋,混凝土梁未预留吊车轨道梁悬吊点连接用的钢筋或穿钢筋套 管处采用植筋方式进行悬吊点连接。部分悬吊点处需进行植筋。 二、主要参考规范 1)施工图纸 2)起重设备安装工程施工及验收规范(gb50278-98) 3)机械设备安装工程施工及验收通用规范(gb50231-98) 4)吊车轨道联结(g-325) 5)钢筋混凝土吊车梁(g-323) 6)混凝土结构后锚固技术规程(jgjl45-2004) 7)混凝土结构加固技术规范(cecs25—90) 8)混凝土结构设计规范(gb0010) 三
精华文档 吊车轨道连接及车档
格式:pdf
大小:15KB
页数:1P
人气:101
4.5

第五章施工方法和技术措施 5.1施工测量 1.按照设计要求,利用经纬仪、钢尺,在原有钢梁基础上测定行走吊车两根钢轨 的中心轴线及起始点,并弹出中心轴线及控制线、确定压板纵向位置。 2.利用已测定的轨道轴线,对压板位置进行定位测设。弹出墨线。 3.利用水准仪测定的轨道轴线控制高程(高程由建设单位确定)。 5.2钢轨拆除施工 1.对原有吊轨拆除时,应保持其钢轨的完整,按照原有吊轨的长度,对压板进行 拆卸。 2.按照由西向东起点和分段的长度,确定施工机具与作业人员。 3.遇到螺栓因锈蚀原因不能自然扭下时,可用气割器具进行切割,注意不能损害 钢轨和压板。 5.3调整板找平安装、钢垫板安装 1.根据测设高程控制线及轴线控制线,利用龙门板挂线,进行调整板找平安装。 2.调整板、钢垫板位置尺寸允许偏差如下表 项目允许偏差(mm) 支撑面标高±3 水平度l/2000 5.4钢轨铺设
格式:pdf
大小:168KB
页数:8P
人气:101
4.5
吊车轨道梁安装方案 一、工程概况 本标段吊车轨道梁工程(含调机工程车库、综合维修车间)包含10条吊车 轨道梁的安装工作,分别为维修综合楼4条、c区镟轮车库2条、d区镟轮车库 4条。 吊车轨道梁采用45a热轧工字钢。现有起重机吊车混凝土梁预留了部分轨道 梁连接悬吊点钢筋,混凝土梁未预留吊车轨道梁悬吊点连接用的钢筋或穿钢筋套 管处采用植筋方式进行悬吊点连接。部分悬吊点处需进行植筋。 二、主要参考规范 1)施工图纸 2)起重设备安装工程施工及验收规范(gb50278-98) 3)机械设备安装工程施工及验收通用规范(gb50231-98) 4)吊车轨道联结(g-325) 5)钢筋混凝土吊车梁(g-323) 6)混凝土结构后锚固技术规程(jgjl45-2004) 7)混凝土结构加固技术规范(cecs25—90) 8)混凝土结构设计规
最新文档 吊车轨道连接及车档
格式:pdf
大小:170KB
页数:8P
人气:101
4.5
吊车轨道梁安装方案 一、工程概况 本标段吊车轨道梁工程(含调机工程车库、综合维修车间)包含10条吊车 轨道梁的安装工作,分别为维修综合楼4条、c区镟轮车库2条、d区镟轮车库 4条。 吊车轨道梁采用45a热轧工字钢。现有起重机吊车混凝土梁预留了部分轨道 梁连接悬吊点钢筋,混凝土梁未预留吊车轨道梁悬吊点连接用的钢筋或穿钢筋套 管处采用植筋方式进行悬吊点连接。部分悬吊点处需进行植筋。 二、主要参考规范 1)施工图纸 2)起重设备安装工程施工及验收规范(gb50278-98) 3)机械设备安装工程施工及验收通用规范(gb50231-98) 4)吊车轨道联结(g-325) 5)钢筋混凝土吊车梁(g-323) 6)混凝土结构后锚固技术规程(jgjl45-2004) 7)混凝土结构加固技术规范(cecs25—90) 8)混凝土结构设计规范(gb0010) 三
格式:pdf
大小:170KB
页数:8P
人气:101
4.5
吊车轨道梁安装方案 一、工程概况 本标段吊车轨道梁工程(含调机工程车库、综合维修车间)包含10条吊车 轨道梁的安装工作,分别为维修综合楼4条、c区镟轮车库2条、d区镟轮车库 4条。 吊车轨道梁采用45a热轧工字钢。现有起重机吊车混凝土梁预留了部分轨道 梁连接悬吊点钢筋,混凝土梁未预留吊车轨道梁悬吊点连接用的钢筋或穿钢筋套 管处采用植筋方式进行悬吊点连接。部分悬吊点处需进行植筋。 二、主要参考规范 1)施工图纸 2)起重设备安装工程施工及验收规范(gb50278-98) 3)机械设备安装工程施工及验收通用规范(gb50231-98) 4)吊车轨道联结(g-325) 5)钢筋混凝土吊车梁(g-323) 6)混凝土结构后锚固技术规程(jgjl45-2004) 7)混凝土结构加固技术规范(cecs25—90) 8)混凝土结构设计规范(gb0010) 三
格式:pdf
大小:13.3MB
页数:32P
人气:101
4.8
00g514六吊车轨道联 结及车挡 精品资料 仅供学习与交流,如有侵权请联系网站删除谢谢2 精品资料 仅供学习与交流,如有侵权请联系网站删除谢谢3 精品资料 仅供学习与交流,如有侵权请联系网站删除谢谢4 精品资料 仅供学习与交流,如有侵权请联系网站删除谢谢5 精品资料 仅供学习与交流,如有侵权请联系网站删除谢谢6 精品资料 仅供学习与交流,如有侵权请联系网站删除谢谢7 精品资料 仅供学习与交流,如有侵权请联系网站删除谢谢8 精品资料 仅供学习与交流,如有侵权请联系网站删除谢谢9 精品资料 仅供学习与交流,如有侵权请联系网站删除谢谢10 精品资料 仅供学习与交流,如有侵权请联系网站删除谢谢11 精品资料 仅供学习与交流,如有侵权请联系网站删除谢谢12 精品资料 仅供学习与交流,如有侵权请联系网站删除谢谢13 精品资料 仅供学习与交流,如有侵权
格式:pdf
大小:521KB
页数:7P
人气:101
4.4
 带有状态约束的双摆效应吊车轨迹规划
带有状态约束的双摆效应吊车轨迹规划 对于欠驱动吊车而言,已有方法大都将负载摆动视为单摆进行处理.然而当吊钩质量相比负载质量不可忽略或负载体积较大时,负载会绕吊钩产生第二级摆动,出现双摆效应,使系统的摆动特性更为复杂,欠驱动度更高,其控制更具挑战性;此外,现有方法均无法保证系统的暂态控制性能.针对这些问题,本文提出了一种基于轨迹规划的消摆定位控制方法.具体而言,本方法所规划的台车轨迹具有解析表达式,且充分考虑系统安全性(摆动幅值)及台车运动的物理约束;通过构造新颖的平坦输出信号,将施加在台车运动和两级摆动上的约束/指标转化为对平坦输出的约束,从而将轨迹规划转化为凸优化问题.该方法能够保证整个过程中系统两级摆动的角度、角速度,台车的速度、加速度、加加速度均保持在设定范围内.通过与已有方法进行仿真对比,可见本方法不仅简单易行,且在工作效率与摆动抑制方面均具有更为良好的控制性能.
文辑创建者
我要分享 >
职位:大数据运维工程师
擅长专业:土建 安装 装饰 市政 园林
相关编辑
文辑推荐
知识推荐
百科推荐