多孔板微阵列制备机器人系统的设计
2024-06-16
设计并研制了一种多孔板微阵列制备机器人系统.该系统机械手采用3自由度移动悬臂式正交结构,利用有限元法对该机械手结构的刚度进行了设计计算.给出了分样头清洗干燥、空气过滤净化、湿度控制的设计方案,建立了控制系统硬件结构和软件功能树.实验结果表明,样机自动化程度高,运行可靠,X、Y轴机械手重复定位精度达到±3.6μm和±2.8μm,能满足微阵列制需的生物学应用需求.

 光纤激光毛化机器人系统
光纤激光毛化机器人系统 光纤激光作为第三代激光技术的代表,具有其他激光器无可比拟的技术优越性和广阔的应用发展空间,将会逐步取代全球大部分高功率co2激光器和绝大部分yag激光器。利用光纤激光器的优点,集成开发了第五代全新的光纤激光机器人毛化系统,系统以光纤激光器为载体,协同机器人及其他设备来完成轧辊毛化作业。光纤激光毛化柔性工作站与传统的co2激光毛化设备相比取得了多项重大突破,如系统采用普通机床代替昂贵的磨床实现毛化功能,不仅节约大量的设备投资费用,并大幅度提高生产效率;系统对轧辊旋转时的轴向跳动容忍度大,毛化速度大幅度提高;光纤激光毛化技术可实现毛化点形貌的任意设计以及毛化点的有序、无序排列;毛化成本大幅度降低,没有三废,是一种绿色制造技术。
第41卷2013年第4期 本 栏 目 编 辑 陆 秋 云 通 用 124 可变径管道机器人系统的 设计与研究 武 燕1,王才东2,王新杰2,牛志军2 1 河南机电职业学院机械工程系 河南郑州 451191 2 郑州轻工业学院机电工程学院 河南郑州 450002 摘要:笔者在分析管道机器人国内外发展现状基础上,针对管道机器人对不同管径需求,提出了一种 双履带式可变径管道机器人的总体方案。设计了机器人的驱动装置、直径调节机构等关键部件,并设 计了机器人的控制系统,该控制系统上采用了上、下位机控制结构,通过手动和自动2种控制模式, 实现机器人无级调速、前进、后退、转弯和图像信息采集等功能。研究结果为可变径管道机器人的实 用化开发奠定了基础。 关键词:管道机器人;变管径;穿缆;控制系统 中图分类号:tp242 文献标志码:a 文章编号:1001-3954
编辑推荐下载
格式:pdf
大小:10.0MB
页数:4P
人气:93
 4.5
4.5
基于分布式结构的图书整理机器人系统设计 针对图书馆图书借阅、上下架和传送整理的智能化需求,设计、开发了一种基于分布式结构的图书整理机器人系统.该系统由循迹移动底盘、图书夹取机械臂和人机交互界面3部分组成.图书整理机器人系统采用plc和单片机作为主控单元,利用超声波传感器和灰度循迹传感器作为障碍检测及巡线定位模块,采用三轴直角坐标运动平台和mg995舵机作为机械臂的三维运动机械臂的驱动装置.通过visu+开发的人机交互界面选取图书信息,可以在无人干预的情况下,实现机器人的巡线定位、超声波避障、自动取/还书籍和实时通信.经过原理样机的搭建和实际测试,验证了系统的可行性和正确性.该系统设计简单、节能环保、自动化执行效率高,能够降低图书馆员的劳动强度,适用于各类大、中、小型图书馆和阅览室,具有广阔的应用空间.
格式:pdf
大小:1.4MB
页数:3P
人气:93
4.7
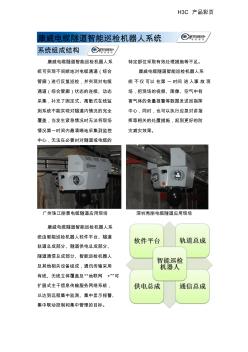
h3c产品彩页 康威电缆隧道智能巡检机器人系 统可实现不间断地对电缆通道(综合 管廊)进行反复巡检,并实现对电缆 通道(综合管廊)状态的连续、动态 采集,补充了固定式、离散式在线监 测系统不能实现对隧道内情况的完全 覆盖,当发生紧急情况时无法将现场 情况第一时间内最清晰地采集到监控 中心,无法在必要时对隧道或电缆的 特定部位采取有效处理措施等不足。 康威电缆隧道智能巡检机器人系 统不仅可以在第一时间进入事故现 场,把现场的视频、图像、空气中有 害气体的含量报警等数据发送回指挥 中心,同时,也可以执行应急对讲指 挥等相关的处置措施,起到更好的防 灾减灾效果。 广州珠江丽景电缆隧道应用现场深圳秀丽电缆隧道应用现场 康威电缆隧道智能巡检机器人系 统由智能巡检机器人软件平台、隧道 轨道总成部分、隧道供电总成部分、 隧道通信总成部分、智能巡检机器人 及其他相关设备组成,通讯传输采用 有线
热门文档 多孔板微阵列制备机器人系统的设计
格式:pdf
大小:540KB
页数:4P
人气:93
4.5
基于Internet的远程控制机器人系统结构设计 针对新一代网络移动机器人特点,构建了包括web中心服务器、机器人控制服务器、图像服务器的遥操作移动机器人系统,该系统为研究者或机器人爱好者提供了一个远程控制移动机器人的试验平台,整个系统可加入更多的移动机器人,连接更多的图像摄像机,具有一定的开放性。
格式:pdf
大小:1.0MB
页数:2P
人气:93
4.6
基于Internet的远程控制机器人系统结构设计探讨 主要由框架设计中的硬件与软件两方面着手,分析设计远程控制机器人系统的一些方法与内容,以望能起到抛砖引玉的作用。
格式:pdf
大小:129KB
页数:2P
人气:93
4.8
影响GRC多孔板墙体开裂的因素 grc多孔板是一种用途广泛的轻质保温绝热板。文章主要指出了grc多孔板墙体产生裂缝的原因,并提出了防治措施。

精华文档 多孔板微阵列制备机器人系统的设计
格式:pdf
大小:305KB
页数:4P
人气:93
4.5
不锈钢厨具拉伸成型工序机器人系统设计与实现 为了提高不锈钢厨具冲压生产的自动化水平,改善现场工作环境,文章采用"pc+运动控制卡+plc"的开放式数控系统构架,应用laas三层体系结构,构造了不锈钢厨具拉伸成型工序机器人系统。该系统以工业机器人为基础,在visualc++环境中运用mfc开发了机器人控制软件。实验表明,该系统设计合理,满足生产自动化要求。
格式:pdf
大小:1.1MB
页数:3P
人气:93
4.5
不锈钢多孔板哪家好 不锈钢冲孔板哪家好?河北坤驰丝网制品有限公司专业生产不锈钢冲孔板, 有多年生产经验和大量常规规格库存,也可根据客户要求定制生产,欢迎拨打我 公司24小时服务电话咨询。 公司已为国内多家大型电子厂家配套生产。本公司设备先进,自动化程度高, 有卷料到卷料、卷料到片料、片料到片料多种形式的加工生产,为不同需求的客 户提供贴心服务,所生产的冲孔网,板面平整,精度高,无毛刺。 不锈钢微孔网(厚度:孔径=1:1)孔径0.4mm、0.5mm、0.6mm、0.7mm、 0.8mm、1mm 出口喷塑铝板网(厚度1.6mm、2mm)孔径2mm-3.5mm 龙门冲整排冲孔(卷料宽度可以达到1500mm)孔径2.5mm-10mm 彩钢卷、镀铝锌卷、不锈钢卷、铝卷、冷轧卷均可以卷料冲孔 不锈钢厚板冲小孔(倒冲,比如2mm厚板冲
格式:pdf
大小:1.4MB
页数:4P
人气:93
4.5

针对目前我国建筑业的整体机械化水平较低,幕墙安装尤其是高空幕墙安装仍旧依赖人工的问题开展了高空幕墙安装智能化施工装备的相关技术研究。对该幕墙安装机器人进行了运动学分析,建立了运动学方程,求出了运动学正解和逆解,并分析了机器人的工作空间,为幕墙安装机器人系统的控制提供了基础。
格式:pdf
大小:874KB
页数:4P
人气:93
4.5
一种单向伸缩式管道机器人系统的建模与仿真 介绍了基于单向运动机构的伸缩式管道机器人工作原理,对管道机器人整机系统进行合理简化,得到等效系统模型。根据等效模型,分析直流伺服电机、滚珠丝杠,以及单向运动机构的动力学行为。为了研究系统的输入电压信号和输出的运动速度之间的关系,建立了机器人系统的完整框图模型。利用matlab对机器人系统进行仿真,分析不同输入信号下系统的响应特性,为管道机器人的机构设计和控制器设计提供理论依据。
格式:pdf
大小:90KB
页数:3P
人气:93
4.6
焊接机器人系统在野外钢结构焊接的应用 随着钢结构制造安装的工程规模越来越大,单纯靠人工焊接的生产方式已经越来越不能满足钢结构制造安装企业的大规模生产需要。焊接机器人以其效率高、重复精度高等诸多优点,被大量应用于钢结构车间内的焊接工作。而由于运输尺寸的制约,大型、超大型钢结构需要在野外施工环境进行现场制造安装,为了使焊接机器人能够更好地适应野外作业环境,通过对多年现场工作经验的总结,再借鉴当下一些主流自动化控制方面的专业技术,提出一些解决焊接机器人在野外焊接应用的思路,希望能够给相关从事机器人研究和生产的专业人士一些启发,通过进一步的努力,将焊接机器人更好地应用到野外钢结构焊接工作中去。
最新文档 多孔板微阵列制备机器人系统的设计
格式:pdf
大小:86KB
页数:2P
人气:93
4.6
多孔板构造双层屋面的隔热性能分析 以压型钢板为基板的多孔板形式搭建双层屋面模型,从功能上构成了一个空气集热器。通过实验的方法获得了不同通风方式下的性能参数,并利用实测数据分析了双层结构的隔热性能。实验结果表明:以室外综合温度和等效热阻为评价指标,双层结构比无空气层结构有更好的隔热性能。
格式:pdf
大小:1.1MB
页数:3P
人气:93
4.6
不锈钢多孔板厂家 河北坤驰丝网制品有限公司是衡水金属丝网行业知名企业,注册资本1000 (万元),公司专业生产不锈钢多孔板,有多年生产经验和大量常规规格库存如 果您对我公司的产品服务有兴趣,请来电咨询。 公司的厂址位于社会经济学家费孝通先生称为“黄金十字交叉处”的衡水安 平县,我们有最好的产品和专业的销售和技术团队,我们为客户提供最好的产品、 良好的技术支持、健全的售后服务,如果您对我公司的产品服务有兴趣,请来电 咨询。 公司已为国内多家大型电子厂家配套生产。本公司设备先进,自动化程度高, 有卷料到卷料、卷料到片料、片料到片料多种形式的加工生产,为不同需求的客 户提供贴心服务,所生产的冲孔网,板面平整,精度高,无毛刺。 不锈钢微孔网(厚度:孔径=1:1)孔径0.4mm、0.5mm、0.6mm、0.7mm、 0.8mm、1mm 出口喷塑铝板网(厚度
格式:pdf
大小:129KB
页数:2P
人气:93
4.7
GRC轻质多孔板隔墙施工 本文较为详细的介绍了grc轻质多孔板在施工中的应用,就其施工流程逐一进行了说明,并对施工的技术要点予以侧重指出。
格式:pdf
大小:79KB
页数:2P
人气:93
4.7
嵌入式清洁机器人系统设计 室内地面清洁是一项枯燥乏味的重复性劳动,传统吸尘器工作时需要人的参与,且操作不便。室内地面清洁机器人将移动机器人技术和吸尘器技术有机地融合起来,结构灵巧,实现了室内环境的自主清洁,是一种环保、健康、智能型的服务机器人,具有广阔的应用前景和市场需求。本设计实现一种全自主清洁机器人,并对路径规划、避障算法、自动充电算法进行研究。
格式:pdf
大小:152KB
页数:未知
人气:93
4.5
预应力多孔板施工中的隐患 最近,笔者走访了江苏、安徽两省20多个乡镇预制厂和建筑工地,发现了一些工程事故隐患,现浅谈如下:1.张拉应力控制不严,甚至失控。大多数的预制厂都是用冷拔低炭钢丝,其张拉控制应力应为σ_k=0.7r_y~b(标准强度),每根钢筋的张拉力应为:
格式:pdf
大小:76KB
页数:2P
人气:93
4.3
巡检机器人控制系统整体软件设计 在巡检机器人控制系统硬件平台上移植了μc/os-ii嵌入式操作系统;根据该控制系统的实际功能需求,进行了系统主要任务的设计与分配;最后对巡检机器人远程控制平台的显示界面进行了功能性的设计,实现电力隧道巡检机器人远程控制平台与巡检机器人硬件终端的交互功能。
格式:pdf
大小:34KB
页数:未知
人气:93
4.4
基于DSP的嵌入式开孔机器人控制系统 针对建筑行业常见的在金属板材上开孔的问题,介绍了以快速开发、成本低廉、维护方便等为目的的嵌入式开孔机器人控制系统的总体设计方案和软硬件结构。该系统选用了ti公司型号为tms320f28335的dsp做为运动控制系统的核心,采用圆柱坐标,多轴联动完成切割运动轨迹。系统整体上可以独立完成与切割相关的参数采集、运动数据计算、切割实时运动控制等功能。该设计方案大大简化了系统结构,增强了系统的可靠性,并优化了软件的结构,使系统控制方式及各种算法的实现更加灵活。
格式:pdf
大小:336KB
页数:7P
人气:93
4.6

机器人系统中的通信网络关键技术研究 摘要:机器人系统是一个复杂的多控制器的系统。对机器人控制系统结构的研究,是机器人 学中的一个重要内容。机器人控制器体系结构主要是指控制机器人的软件和硬件结构,通常 也简称为机器人体系结构。研究机器人体系结构的目的是为简化机器人系统的设计和开发, 特别是随着机器人控制和功能日益复杂化,而越来越受到重视。本文介绍了机器人系统的控 制器,设计了这些控制器之间的通信协议和即插即控的机制框架。 关键字:机器人系统控制器通信协议 0、引言 机器人是一种自动化的机器,它既可以接受人类指挥,又可以运行预先编排的程序,也 可以根据以人工智能技术制定的原则纲领行动。它的任务是协助或取代人类工作的工作,例 如生产业、建筑业,或是危险的工作。所不同的是这种机器具备一些与人或生物相似的智能 能力,如感知能力、规划能力、动作能力和协同能力,
文辑创建者
我要分享 >
职位:农林水利建设机械员
擅长专业:土建 安装 装饰 市政 园林
相关编辑
文辑推荐
知识推荐
百科推荐