履带起重机塔式臂架整体稳定性分析方法
2025-01-17
山东大学 硕士学位论文 履带起重机塔式臂架的整体稳定性分析方法研究 姓名:李玉梅 申请学位级别:硕士 专业:工程力学 指导教师:周慎杰 20080918 履带起重机塔式臂架的整体稳定性分析方法研究 作者: 李玉梅 学位授予单位: 山东大学 相似文献(1条) 1.期刊论文 谭烈刚 . 杨勇 履带起重机塔式臂架的受力分析与研究 -科技风2009,""(21) 履带起重机在高层建筑行业中运用很广泛,塔式臂架机构是履带起重机的主要机构之一,其要承担起升栽荷、臂架重力、惯性载荷和风载荷等,因此要 对其进行严格的受力分析,并进行板核计算.由于吊臂结构承受很大的栽荷作用且具有很大的危险性,因此必须对塔式臂架进行受力分析,以便来预防各种 潜在的危险. 本文链接: http:/


大连理工大学 硕士学位论文 履带起重机臂架有限元简化模型稳定性分析 姓名:马青 申请学位级别:硕士 专业:机械电子工程 指导教师:赵福令 20081201 履带起重机臂架有限元简化模型稳定性分析 作者:马青 学位授予单位:大连理工大学 相似文献(10条) 1.期刊论文李葳.周慎杰.崔蕴芳.林麒基于ansys的履带起重机臂架参数化建模-中国科技信息2007,""(19) 臂架是履带起重机的主要受载构件,其强度直接影响起重机的安全性能.一台履带起重机具有多种臂架组合方式,使得有限元模型的建立非常繁琐.本 文以ansys参数化设计语言(apdl)为基础,研究了履带起重机臂架系统参数化建模方法,设计了局部参数和总体参数两种参数.通过设置两
 履带式起重机抗倾覆稳定性分析
履带式起重机抗倾覆稳定性分析 分析了履带式起重机倾覆的原因,并对其进行了受力分析,得出了履带式起重机作业过程中的受力和主要参数,对进一步提高履带式起重机的抗倾覆稳定性具有一定的参考意义。
编辑推荐下载
格式:pdf
大小:2.3MB
页数:16P
人气:67
 4.6
4.6
14-2起重运输机械 14-2-1履带起重机 14-2-1-1履带起重机的型号分类 履带起重机是在行走的履带底盘上装有起重装置的起重机械,是自行式、全 回转的一种起重机,它具有操作灵活、使用方便、在一般平整坚实的场地上可以 载荷行驶和作业的特点。是结构吊装工程中常用的起重机械。 履带起重机按传动方式不同可分为机械式、液压式和电动式三种。电动式不 适用于需要经常转移作业场地的建筑施工。 履带起重机的型号分类及表示方法见表14-28。 履带起重机型号分类及表示方法表14-28 类组型代号代号含义 主参数 名称 单位表 示法 起重 机型 履带起重机 q,u(起,履) 机械式qu机械式履带起重机 最大额定 起重量 t液压式y(液)quy液压式履带机重机 电动式d(电)qud电动式履带起重机 14-2-1-2履带起重机的主要技术性能 国内生产的几种
格式:pdf
大小:2.3MB
页数:16P
人气:67
4.5
xxxxxxxxxxxxx xxxxxxxxxxx 14-2起重运输机械 14-2-1履带起重机 14-2-1-1履带起重机的型号分类 履带起重机是在行走的履带底盘上装有起重装置的起重机械,是自行式、全 回转的一种起重机,它具有操作灵活、使用方便、在一般平整坚实的场地上可以 载荷行驶和作业的特点。是结构吊装工程中常用的起重机械。 履带起重机按传动方式不同可分为机械式、液压式和电动式三种。电动式不 适用于需要经常转移作业场地的建筑施工。 履带起重机的型号分类及表示方法见表14-28。 履带起重机型号分类及表示方法表14-28 类组型代号代号含义 主参数 名称 单位表 示法 起重 机型 履带起重机 q,u(起,履) 机械式qu机械式履带起重机 最大额定 起重量 t液压式y(液)quy液压式履带机重机 电动式d(电)qud电动式履带起重机 1
热门文档 履带起重机塔式臂架整体稳定性分析方法
格式:pdf
大小:924KB
页数:35P
人气:67
4.7
要完整说明书和图纸找扣扣二五一一三三四零八 摘要··················································i abstract··················································ii 第1章履带起重机概述·································-1- 1.1履带起重机简介····································-1- 1.2国外履带起重机发展状况·····························-1- 1.3国内履带起重机发展状况·····························-3- 1.4履带式起重机的发展趋势·····························-5- 1.5履带
格式:pdf
大小:231KB
页数:2P
人气:67
3
网壳结构的整体稳定性分析方法——介绍了壳体结构的四类整体稳定性分析方法,并分别阐述了各类网壳结构整体稳定性分析方法的原理、研究现状及其优缺点,为工程结构分析提供指导,以期提高壳体结构稳定性分析水平。
格式:pdf
大小:1.5MB
页数:3P
人气:67
4.8
履带起重机臂架结构应力试验与分析 对履带起重机桁架臂进行静动态应力测试,静态应力作为评估其强度的依据,动态应力使用雨流计数法统计载荷谱,作为评估其疲劳寿命的依据。
格式:pdf
大小:2.3MB
页数:16P
人气:67
4.4
xxxxxxxxxxxxx xxxxxxxxxxx 14-2起重运输机械 14-2-1履带起重机 14-2-1-1履带起重机的型号分类 履带起重机是在行走的履带底盘上装有起重装置的起重机械,是自行式、全 回转的一种起重机,它具有操作灵活、使用方便、在一般平整坚实的场地上可以 载荷行驶和作业的特点。是结构吊装工程中常用的起重机械。 履带起重机按传动方式不同可分为机械式、液压式和电动式三种。电动式不 适用于需要经常转移作业场地的建筑施工。 履带起重机的型号分类及表示方法见表14-28。 履带起重机型号分类及表示方法表14-28 类组型代号代号含义 主参数 名称 单位表 示法 起重 机型 履带起重机 q,u(起,履) 机械式qu机械式履带起重机 最大额定 起重量 t液压式y(液)quy液压式履带机重机 电动式d(电)qud电动式履带起重机 1
格式:pdf
大小:2.3MB
页数:16P
人气:67
4.5
14-2起重运输机械 14-2-1履带起重机 14-2-1-1履带起重机的型号分类 履带起重机是在行走的履带底盘上装有起重装置的起重机械,是自行式、全 回转的一种起重机,它具有操作灵活、使用方便、在一般平整坚实的场地上可以 载荷行驶和作业的特点。是结构吊装工程中常用的起重机械。 履带起重机按传动方式不同可分为机械式、液压式和电动式三种。电动式不 适用于需要经常转移作业场地的建筑施工。 履带起重机的型号分类及表示方法见表14-28。 履带起重机型号分类及表示方法表14-28 类组型代号代号含义 主参数 名称 单位表 示法 起重 机型 履带起重机 q,u(起,履) 机械式qu机械式履带起重机 最大额定 起重量 t液压式y(液)quy液压式履带机重机 电动式d(电)qud电动式履带起重机 14-2-1-2履带起重机的主要技术性能 国内生产的几种
精华文档 履带起重机塔式臂架整体稳定性分析方法
格式:pdf
大小:1.9MB
页数:8P
人气:67
4.4
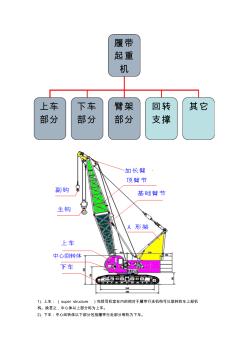
1).上车:(superstructure)包括司机室在内的相对于履带行走机构可以旋转的车上部机 构。换言之,中心体以上部分称为上车。 2).下车:中心回转体以下部分包括履带行走部分等称为下车。 履带 起重 机 上车 部分 下车 部分 臂架 部分 回转 支撑 其它 3).中心回转体:大齿圈与小齿轮彼此啮合,大齿轮与下车固连,上车坐落于大齿轮的轴承 上,且马达、减速机固连。大小齿轮与轴承组成中心回转体。马达、减速机作自转和公转, 推动上车的回转。 4).平台:(platform或flatroof)上车位于中心的承载各种设备的车架,称为平台。平台 包括主平台和左右走台 5).主平台:(mainplatform)平台中间部分 上车 部分 司机室平台机罩卷扬机 左走台主平台左右 机罩 主卷副卷变幅 a型架 右走台 空调发动机配重 卷扬
格式:pdf
大小:681KB
页数:22P
人气:67
4.7

中联重科 quy200履带起重机 技术介绍册 中联重科工程起重机公司 2008年3月 1 目录 1.外形尺寸和重量 1)基本臂臂主机外形尺寸及工作重量 2)主要性能参数 3)主要配置 4)主要运输部件外形尺寸及重量 主机 履带架 配重底板 配重 2.技术说明 1)臂架及拉板 2)机构 3)系统 4)安全装置 5)操纵室 6)吊钩 3.臂架配置组合表 4.起重性能 1)主臂起重特性 2)主臂+固定副臂起重特性 3)主臂+塔式副臂起重特性 2 1.外形尺寸和重量 1)基本臂主机外形尺寸及重量 3 2)quy200主要性能参数 项目数值备注 最大起重量×幅度t×m200×5 基本臂时自重t196 主臂长度m20~83 固定副臂长度m12~30 固定副臂最大起重量t32 固定副臂安装角度°10,30 主臂+固定副臂最大长度m
格式:pdf
大小:61KB
页数:未知
人气:67
4.7
船厂履带起重机 在许多造船厂,巨大的船体模块都是用大型龙门起重机搬运和定位焊接的。而在印度尼西亚的巴淡岛.britoil公司采用4台马尼托瓦克999型履带起重机,精心编排了一组4台起重机协力合作的组合吊装作业。
格式:pdf
大小:70KB
页数:1P
人气:67
4.8
XGC25T伸缩臂履带起重机 xgc25t伸缩臂履带起重机属于非路面移动式起重机械,该结构形式的起重机械既具备汽车起重机不需拆卸、机动灵活、可在高度受限场合下工作的特点,又集合了履带式起重机的吊载量大、回转平稳、可带载行走、并能在非公路场合工作的特点。主要用于建筑工地压桩,桥梁、隧道内施工,建筑物内部拆卸,船仓内作业等高度受
格式:pdf
大小:748KB
页数:4P
人气:67
4.6
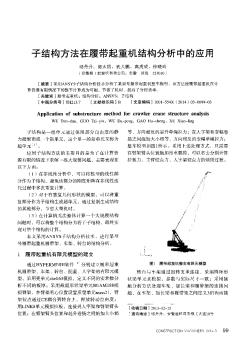
采用ansys子结构分析技术分析了某型号履带起重机整车模型,该方法使履带起重机在计算资源有限情况下的整车计算成为可能,节省了机时、提高了分析效率。
最新文档 履带起重机塔式臂架整体稳定性分析方法
格式:pdf
大小:1.3MB
页数:2P
人气:67
4.4

简单地介绍了一些确定性分析方法应用于边坡的稳定性分析及判断.对其中的理论做一些简单的总结.边坡稳定的确定性分析方法的基本理论,是将影响边坡的各种影响因素(包括环境因素)作为确定的量来进行分析,一般以稳定系数为分析基础.在收集边坡周围具体的环境参数值和变形观测值后得出的具体资料可以建立具体数学函数表达式来拟合两者关系,能够显示岩土体在环境作用下的力学、物理性质,用于预测和防治边坡的变形和破坏.
格式:pdf
大小:64KB
页数:2P
人气:67
4.6
-90- 中国科技信息2007年第19期 china science and technology information oct.2007制 造 挺杆头、挺杆根、挺杆标准节、挺杆支 撑杆以及扳起架。本文在此基础上,按照 不同工作形式设置参数,通过参数组装臂 架,并安装钢丝滑轮系统。 模型的组装过程实际上是将各个部件 模型移动或转动到一定的位置,通过节点 耦合或合并连接到一起的过程。本文规 定,以主臂根孔轴心连线的中点为坐标原 点,使臂架模型位于回转轴线左侧。 在安装履带起重机时,往往先分别装 配臂架,再把臂架组合到一起,然后调整 臂架倾角。本文在分别装配完臂架后先调 整倾角,再将臂架组装到一起。 3 基于apdl的参数化建模方法 ansys参数化设计语言(apdl) 是一种类似fortran的解释性语言,提 供了数值型、字符型和表三种类型的参 数,可以方便地设置变量和数组
格式:pdf
大小:147KB
页数:2P
人气:67
4.6
介绍了应用于履带式起重机吊臂(桁架结构)的拼焊工装,其方法是利用两平行(间距可以相对调节)的墙板,每个墙板上有很多个螺纹孔,利用专用支座和销轴,实现了不同截面桁架结构吊臂的拼焊,拼焊后的臂架结构不需要机械加工,就可以满足图纸要求,可以同时拼焊两个履带吊臂架,既提高了工作效率,又降低了加工成本。
格式:pdf
大小:78KB
页数:3P
人气:67
4.4
履带起重机超起桅杆替换性研究 超起工况是大吨位履带起重机经常用到的工况,具有超起工况的履带起重机都有对应的超起桅杆.同时,超起桅杆作为独立装置,用户采购时需单独采购,对于有多种型号履带起重机的用户,会增加采购成本,因此研究不同型号超起桅杆的替换行就十分有必要.本文以现有350t履带起重机为例,借用其他型号履带起重机超起桅杆,通过专业的设计,在较少改动部分结构的情况下,能实现超起桅杆的替换.
格式:pdf
大小:468KB
页数:5P
人气:67
4.7
履带起重机起臂过程动力学分析 基于有限元分析技术,建立臂架的有限元模型,在ansys软件中对履带起重机的起臂过程进行动力学分析.用link180单元模拟变幅拉板,利用其在温度载荷下的变形特性,通过设置相关的线性热膨胀系数和温度载荷,使单元长度匀速缩短,带动臂头,完成起臂控制.以位移约束的方法代替常规载荷约束的方法,解决了起臂过程模拟中,由于拉板力大小和方向随时间不断变化,无法定义载荷步的问题.ansys软件结构动力学分析模块中含有瞬态分析模块,可对履带起重机起臂的动态过程进行模拟和有限元分析,为实际的履带起重机起臂调试过程提供参考.
格式:pdf
大小:565KB
页数:7P
人气:67
3
弦支穹顶结构动力稳定性分析方法——系统阐述了弦支穹顶结构动力稳定性分析方法,论证了基于严格数学定义的lyapunov运动稳定性理论和方法不能对地震作用下的非线性、多自由度系统的稳定性提供有效判别准则.提出了基于b.r运动准则的改进判别方法,以此为基础结...
格式:pdf
大小:35KB
页数:2P
人气:67
4.8
第5卷第5期中国水运vol.5no.5 2007年5月chinawatertransportmay2007 收稿日期:2007-3-21 作者简介:李银海男(1980-)中交第二航务工程勘察设计院有限公司助理工程师(430000) 研究方向:工程地质方向研究 边坡工程常用稳定性分析方法 李银海 摘要:本文对目前边坡工程中常用的一些稳定性分析方法进行了系统的总结,对它们各自的主要原理、特点及其 优缺点等进行了阐述,为实际工程的边坡稳定性计算提供了指导意义。 关键词:岩土工程边坡工程高边坡稳定分析方法 中图分类号:
格式:pdf
大小:98KB
页数:2P
人气:67
4.4
本文对目前边坡工程中常用的一些稳定性分析方法进行了系统的总结,对它们各自的主要原理、特点及其优缺点等进行了阐述,为实际工程的边坡稳定性计算提供了指导意义。
格式:pdf
大小:601KB
页数:4P
人气:67
4.5
油罐地基充水预压处理稳定性分析方法 介绍了一种评判在油罐地基充水预压地基处理中地基稳定性控制方法即应力路径法,并且结合工程实践进行了验证。在p-q,p′-q′平面中,油罐应力路径esp有效应力路径和tsp总应力路径随着充水荷载增加变化明显,应力路径反映了地基孔隙水压力长消情况和土体应力变化情况,随着充水荷载的增加,油罐地基安全系数逐渐减小,然后又增加,但是充水过程中安全系数fs均大于1,油罐地基是稳定的,基础中心下安全系数最小值fs=1.09。工程实践结果说明应力路径法在油罐地基充水预压地基处理中控制地基稳定性时,具有简单、直观和高效的优点。
文辑创建者
我要分享 >
职位:数据中心暖通设计工程师
擅长专业:土建 安装 装饰 市政 园林
相关编辑
文辑推荐
知识推荐
百科推荐