门口检测策略的灭火机器人的设计
2025-02-18
依据机器人灭火比赛规则,本文设计基于门口检测策略的灭火机器人,在已有机器人的基础上对各种传感器进行科学布局,实现火源门口检测功能。主要实现了避障、寻火、灭火和回家四个模块。实验表明本文的灭火策略的灭火时间大大缩短。

灭火机器人 机器人这个概念早已家喻户晓,它是自动执行工作的机器装置,可以协助或者取代人类从 事多种工作。由机器人来代替人类在危险的工作环境中工作,尤其是特殊紧急险情等危害公 共安全时,机器人发挥着越来越重要的作用。本文仅就消防机器人在国内外的发展现状做简 要介绍,并对消防机器人在实际中的应用及改进方向做较为详尽的阐述,供广大同仁参考。 “机器人”一词问世以来,一直成为高科技高尖端的代名词。世界发达国家均在机器人 的研发上投入大量的人力财力。机器人是自动执行工作的机器装置,可以协助或者取代人类 从事多种工作。近年来,机器人已经在很多国家的多个行业逐步代替了手工,是人力资源匮乏 国家解决劳动力问题的上佳选择。而由机器人来代替人类在危险的工作环境中工作,尤其是 危害公共安全的火灾、毒气、爆炸等特殊紧急险情时,机器人发挥着越来越重要的作用。消 防事业直接服务于经济建设,高
 基于多传感器信息融合的灭火机器人设计
基于多传感器信息融合的灭火机器人设计 为提高智能灭火机器人距离和火焰检测的准确性,设计了由超声波、红外测距模块和数据融合模块组成的测距避障子系统;由红外火焰检测模块、数据融合模块组成的火焰检测子系统,在此基础上,采用自适应加权数据融合算法分别对多传感器检测的距离和火焰信息进行融合,以提高对火源目标判断的准确度。实验结果表明,设计的智能灭火机器人传感器软硬件系统测量相对误差小,能很好的反映火灾现场信息,满足火情探测和灭火需要。
编辑推荐下载
格式:pdf
大小:804KB
页数:5P
人气:57
 4.6
4.6
转臂式灭火机器人灭火技术研究与实现 为有效地应对目前日益复杂的灭火环境,减少不必要的人员伤亡,根据火灾现场实际环境,针对现有灭火机器人研究所存在的问题,对机器人灭火技术进行研究并自主研发了基于atmega单片机技术的灭火机器人系统,该系统设计了独特的转臂灭火机构和喷水灭火装置。经灭火实验验证,该系统可有效地提高灭火质量和效率,为灭火机器人的实际应用和推广提供支持。
格式:pdf
大小:16KB
页数:1P
人气:57
4.4
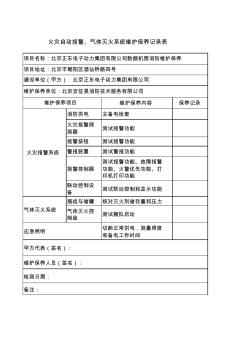
维护保养内容保养记录 消防供电主备电检查 火灾报警探 测器 测试报警功能 报警按钮测试报警功能 警报装置测试警报功能 报警控制器 测试报警功能、故障报警 功能、火警优先功能、打 印机打印功能 联动控制设 备 测试联动控制和显示功能 瓶组与储罐核对灭火剂储存量和压力 气体灭火控 制盘 测试模拟启动 切断正常供电,测量照度 和备电工作时间 项目地址:北京市朝阳区酒仙桥路四号 检测日期: 应急照明 气体灭火系统 甲方代表(签名): 维护保养人员(签名): 备注: 火灾报警系统 火灾自动报警、气体灭火系统维护保养记录表 项目名称:北京正东电子动力集团有限公司数据机房消防维护保养 维护保养单位:北京安征昊消防技术服务有限公司 维护保养项目 建设单位(甲方):北京正东电子动力集团有限公司
热门文档 门口检测策略的灭火机器人的设计
格式:pdf
大小:13KB
页数:17P
人气:57
4.4
消防设施的种类及配置——灭火机 灭火机 化工厂房、库房、露天设备、生产装置区、贮罐区,除应设置固定 灭火设施外,还应设置小型灭火机,以利扑救初起火灾。 常用的灭火机类型及其性能、用途如表13—32。 表15—32灭火机性能及用途 灭火机类型 泡沫灭火机 二氧化碳灭火机 干粉灭火机 “1211”灭火机 四氯化碳灭火机 规格 10升65~130升 2公斤以下2~3公斤5~7公斤 8公斤50公斤 1公斤2公斤3公斤 3公斤以下2~3公斤6~8公斤 药剂 筒内装有碳酸氢钠、发沫剂和硫酸铝溶液 瓶内装有压缩成液体的二氧化碳 钢筒内装有钾盐(或钠盐)干粉。并备有盛装压缩气体的小钢瓶 钢筒内充装二氟一氯一溴甲烷,并充填压缩氮气 瓶内装有四氯化碳液体并加有一定压力 用途 扑救固体物质或其他易燃液体火灾。不能扑救忌水和带电设备火灾 扑救电气,精密仪器,油类
格式:pdf
大小:131KB
页数:1P
人气:57
4.5
气体灭火系统灭火机理 气体灭火系统的灭火机理与气体灭火剂属性有密不可分的关系,不同的灭火剂其灭火机 理也各不相同,本节主要介绍四类常见气体灭火系统的灭火机理。 一、二氧化碳灭火系统 二氧化碳灭火作用主要在于窒息,其次是冷却。在常温常压条件下,二氧化碳的物态为 气相,当贮存于密封高压气瓶中,低于临界温度31.4℃时是以气、液两相共存的。在灭 火过程中,当二氧化碳从贮存气瓶中释放出来,压力骤然下降,使得二氧化碳由液态转 变成气态,分布于燃烧物的周围,稀释空气中的氧含量。氧含量降低会使燃烧时热的产 生率减小,而当热产生率减小到低于热散失率的程度,燃烧就会停止下来。这是二氧化 碳所产生的窒息作用。另一方面,二氧化碳施放时又因焓降的关系,温度急剧下降,形 成细微的固体干冰粒子,干冰吸取其周围的热量而升华,即能产生冷却燃烧物的作用。 二、七氟丙烷灭火系统 七氟丙烷灭火剂是一种无色无味、不导电的气
格式:pdf
大小:7KB
页数:2P
人气:57
4.6
1 摘要 首先,本文简述了机器人和移动机器人的概念以及吸尘器机器人的研究意义。然 后,本文对所设计的机器人的控制系统进行了研究,建立了基于双轮独立驱动系统的 数学模型,并确定了控制系统的各个模块。接下来本文重点叙述了控制器模块、传感 器模块和电机驱动模块的设计。对于控制器模块,首先简述了atmege16型微控制 器的性能指标,然后设计了其基本电路。对于传感器模块,首先简述了红外传感器的 性能,然后研究了其在车体上的分布和其本身的硬件结构,最后对红外发射电路和接 收电路进行了设计。对于电动机驱动模块,首先对直流电动机pwm控制进行了研究, 然后设计了电动机的驱动电路,并简述了使用atmege16产生pwm信号的方法。 关键词:移动机器人;atmega16微控制器;红外传感器;直流电动机pwm 控制;l298n。 2 abstract first
格式:pdf
大小:1.4MB
页数:4P
人气:57
4.7
可变径煤矿管道检测机器人的设计 在煤矿生产中使用大量的管道,其质量关系到整个煤矿的安全和高效生产。为提高管道寿命,预防管道老化、腐蚀及断裂等问题,并实现高效准确地故障诊断,笔者设计了一种可变径管道检测机器人,并建立了机器人三维模型,利用adams对其进行运动仿真,从而验证了机器人在直径为220~300mm的管道中自由行走和检测的可行性。
格式:pdf
大小:334KB
页数:4P
人气:57
4.4
护理机器人的工业设计 阐述了工业设计在机器人产业化进程中的重要作用,并以实际案例分析了护理机器人的工业设计目标、约束条件及具体设计过程,为能设计出成熟的、有市场竞争力的产品做出了有益尝试。
精华文档 门口检测策略的灭火机器人的设计
格式:pdf
大小:102KB
页数:5P
人气:57
4.7
基于场地分区的机器人足球守门员防守策略设计 通过对场地分区处理,提出了以小球为中心的守门员积极防守策略.在定义守门员3个属性的基础上,设计了小球在球场中不同区域内时守门员的具体防守策略.该策略针对小球运动的各种情况,及时调整守门员在球门区的位置与姿态,实现守门员的高效防守.实际比赛结果证明了所设计的策略是有效的.
格式:pdf
大小:252KB
页数:18P
人气:57
4.8

机器人自动火焰切割h型钢的设计 1 目录 目录⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯(1) abstract⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯(2) 第1章工作台的设计院⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯(3) 1.1工作台总体方案⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯(3) 1.2工作台的结构设计⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯(3) 1.3滚珠丝杠螺母副的确定及验算⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯(4) 1.4导轨的选型及计算⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯(6) 1.5推动工件的电机选择⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯(
格式:pdf
大小:181KB
页数:3P
人气:57
4.4
粉状物料储运计量箱式机器人的设计 阐述了粉状物料的储运现状,介绍了粉状物料储运计量箱式机器人的设计思路和特有的可自行上下汽车,完成输出计量的特性.
格式:pdf
大小:118KB
页数:1P
人气:57
4.6
基于PWM信号遥控机器人的设计与制作 本文介绍一款遥控机器人,以atmega16单片机为核心控制器,用航模遥控器驱动mg945舵机工作,控制机器人的运动。该机器人具有可无线遥控、垂直升降、自主语音讲解等功能。本系统采用模块化设计思想,软件用c语言编写。
格式:pdf
大小:29.8MB
页数:99P
人气:57
4.4
놱뺩릤튵듳톧쮶쪿톧캻싛컄믹폚ccd뗄맜쓚ퟷ튵믺웷죋맜뗀볬닢쪵퇩쾵춳퇐뺿탕쏻ꎺ훜쇺짪쟫톧캻벶뇰ꎺ쮶쪿튵ꎺ닢쫔볆솿벼쫵벰틇웷횸떼뷌쪦ꎺ뫎듦뢻20070501 믹폚ccd뗄맜쓚ퟷ튵믺웷죋맜뗀볬닢쪵퇩쾵춳퇐뺿ퟷ헟ꎺ훜쇺톧캻쫚폨떥캻ꎺ놱뺩릤튵듳톧쿠쯆컄쿗(1쳵ì1.톧캻싛컄헅탱쏷뇤뺶췤맜쓚죤뚯쪽럂짺믺웷죋벰쫓뻵볬닢벼쫵퇐뺿2005릤튵훐닉폃쇋듳솿평틬훖룖몸뷓뷸탐솪뷡뗄맜뗀ꎬ헢샠맜뗀퓚뎤웚럾틛맽돌훐ꎬ틲룷훖췢뷧틲쯘뗄ퟷ폃ꎬ퓚틬훖룖몸뷓뷓춷늿캻뿉쓜돶쿖좱쿝ꎬ캪럀횹킹슩뗈쫂맊뗄랢짺ꎬ뇘탫뛔맜뗀뷸탐폐킧뗄볬닢캬뮤ꆣ떫쫇ꎬ쳘쫢릤튵훐뗄튻킩맜뗀웤뷡릹럇뎣뢴퓓ꎬ늻뷶맜뺶뇤뮯뛸쟒냼몬쟺싊냫뺶뷏킡뗄췤쟺뷡릹ꎬ쫜맜뗀쓚늿뿕볤벰뷡릹뗄쿞훆ꎬ컞램닉폃죋릤쫖뛎뷸탐볬닢ꎬ뛸뎣맦뗄맜뗀믺웷죋뫜쓑뷢뻶퓚헢훖뢴퓓맜뗀쓚뗄춨맽탔컊쳢ꎻ
最新文档 门口检测策略的灭火机器人的设计
格式:pdf
大小:237KB
页数:3P
人气:57
4.5
基于构件的工业机器人测控软件系统的研究 基于模块化的设计思想,对构成工业机器人测控系统的功能模块进行较详细的分析。在此基础上,利用软件构件技术设计了功能模块对应的构件。论述了构件的构造方式以及组合过程,特别是对控制模块相对应的基于基本动作的构件进行较详细的分析。最后,结合实例介绍了该测控系统的应用,并证实了该系统的有效性。
格式:pdf
大小:33KB
页数:3P
人气:57
4.7

1 1、工业领域中一般多用6关节型机器人,根据所学内容谈谈 该种机器人都有哪些部件组成,每个部件的工作原理及选择 该部件的依据(800字以上) 目前各大工业机器人厂商提供的六轴关节机器人结构从外观上看大同小异,相差不大,从本 质上来说,其结构应该都是一致的,即其第一关节旋转轴(基座旋转轴)、第四关节旋转轴、 第六关节旋转轴(手腕端部法兰安装盘的旋转中心)在同一个平面内;第二关节旋转轴、第 三关节旋转轴以及第五关节旋转轴互相平行,而且与前面提到到平面垂直;另外,还需要保 证第四关节旋转轴线、第五关节旋转轴线以及第六关节旋转轴线相交于一点。采用该种结构 的工业机器人可以使得其运动学算法最为简单可靠。设计的机器人要保证高的定位精度,就 必须尽可能的满足上述条件,通过机械加工及装配精度来保证最终的机器人运行精度控制在 一定范围内。如果机器人的结构与此差别较大的话
格式:pdf
大小:2.6MB
页数:12P
人气:57
4.4

作图步骤: 1、双击桌面robotstudio5.15图标,如下图所示。 点击左侧选项栏,选择授权。 然后选择激活向导,选择如下: 2、点击创建文件,出现如下界面。 3、选择机器人模型,点击abb模型库,出现如下界面,选择irb2600.把承重能力改为20kg. 4、然后点击导入模型库,下拖选择mytool后,然后把左侧边mytool工具拖到 irb2600-20-165-01,机器人上自动安装了喷头工具。 5、然后点击机器人系统菜单,选择从布局创建系统。 在此项目中,可以在名称处修改系统的名称,尤其在系统多的情况下。在主菜单中,一定要 修改工具,把原始的tool10改为mytool。或者,在放入机器人时,即完成此项设置,可以 不需要修改此项。 一直选择下一个,即可成功。 成功后,屏幕右下角变为绿色。 5、选择建模,在菜单中选择固体,再选择矩形体。
格式:pdf
大小:457KB
页数:6P
人气:57
4.5

1 机 器 人 实 验 报 告 册 制作人:叶翔徐培嘉陈琳 制作日期:2012年12月 2 目录 1、中国机器人大赛双足竞步机器人比赛规则简述............3 2、双足竞步机器人构成简介.......................3 3、功能及其改进方案简介.........................4 4、设计与制作软件简介...........................4 5、比赛功能简介.................................5 6、制作心得体会.................................6 3 一、中国机器人大赛双足竞步机器人比赛规则简述 1、交叉足印竞步机器人: 结构只有双足、并只能以走路的方式来移动,机器人要分清楚正面及背面, 以箭头方向作为正面,是自主式脱线控制,用
格式:pdf
大小:289KB
页数:1P
人气:57
4.6
iPad专用机器人支架诞生 美国创业公司doublerobotics开发了一款名为double的机器人。它由一部ipad、一个支架和电动两轮底座组成,支持远程操纵,能实现前进、转弯等动作,可以在公司或家里使用。它能伸展至5英尺高,或折叠至5.6英尺,从而模拟操纵者的站姿或坐姿。doubletelepresencerobot目前售价1999美元,折合人民币约12477元,对于那种公事繁忙,又抽不出身去参加各种会议的大佬们来说,这个东西真的是个不错的贴心宝贝。
格式:pdf
大小:171KB
页数:2P
人气:57
4.7
智能灭火机器人自动避障和火焰搜索的设计方案 微电子与人工智能技术的发展让我们的生活发生了很大的改变,尤其是智能机器人的出现更是大大提高了生产力,代替了人类进行很多人类难以完成的工作。灭火智能机器人一直是人们讨论的话题.
格式:pdf
大小:77KB
页数:2P
人气:57
4.4
一款新型比赛用灭火机器人的设计方法 文章主要介绍了一款基于"能力风暴杯"中国教育机器人大赛中灭火机器人比赛的新型机器人的设计与制作,该机器人具有合理的硬件配置与精密寻火路径算法,能在较短时间内准确搜寻到火焰并快速灭火然后返回出发点。
格式:pdf
大小:103KB
页数:未知
人气:57
4.7
消防灭火机器人的设计与研究 灭火机器人可以替代人类在一些高危环境下作业,避免人员伤亡.机器人以单片机为控制核心,加以电源电路、电机驱动、避障前进系统、火焰检测电路、灭火系统以及其它电路构成.电源电路提供系统所需的工作电源,专用电机驱动芯片驱动电机控制机器人的前进后退以及转向,避障前进系统完成寻迹和避障,光敏电阻传感器检测火焰,灭火系统进行灭火.
格式:pdf
大小:161KB
页数:2P
人气:57
4.4
智能灭火机器人设计中多传感器信息的应用 本文通过分析自适应加强数据融合算法分别融合多传感器检测距离、火焰信息,以准确判断火源目标,通过实践发现,设计多传感器信息的智能灭火机器人不但对软件系统测量误差小,而且对硬件系统测量误差也很小,同时还能准确反映出火灾信息,符合探测火情的要求,具有一定的应用价值.
格式:pdf
大小:117KB
页数:1P
人气:57
4.4
立体化仓库智能灭火机器人的设计与制作 随着社会的进步,越来越多的储存仓库朝着大型化、立体化发展,但是随之而来的是消防安全隐患的存在。本文设计一种以arm9为控制核心的立体化仓库灭火机器人,包括硬件、软件设计。火灾发生时灭火机器人上传感器发出报警,在消防人员的远程操控下查看火情并及时扑灭。
文辑创建者
我要分享 >
职位:驻场施工员
擅长专业:土建 安装 装饰 市政 园林
相关编辑
文辑推荐
知识推荐
百科推荐