攀爬电力铁塔机器人爬行方案设计
2025-01-19

 攀爬电力铁塔机器人的爬行方案设计
攀爬电力铁塔机器人的爬行方案设计 目前电力特种机器人的研究主要集中在巡线机器人方面,用于巡检电力铁塔的机器人还鲜有成果。攀爬电力铁塔机器人爬行方案的设计,是研制攀爬电力铁塔机器人的基础。本文通过分析比较几种爬行机构,结合攀爬电力铁塔机器人的性能要求及工作环境确定了该机器人的一种爬行方案。
电力铁塔攀爬机器人的步态分析 为了提高电力系统的自动化水平,减轻电力工人在检修高压输电系统时的劳动强度,同时保障其人身安全,提出并设计了一种可以攀爬电力铁塔的5自由度关节式机器人,给出了机器人的cad模型,分析了其在铁塔两种位置攀爬过渡的能力.根据机器人机构特征,提出、分析和比较了蠕虫式和扭转式攀爬步态.蠕虫式攀爬步态即机器人本体的两连杆之间角度周期变化,两爪交替前进;扭转式攀爬步态即机器人本体不动,爪部回转关节旋转180°使得机器人整体扭转半周.在机械系统动力学仿真软件adams环境下,对机器人采用这两种步态在铁塔主材表面、横担侧面和上表面3种方位攀爬情况进行了仿真,计算和分析了不同情况下机器人各关节转矩和系统能耗,得出最适合铁塔各种方位的攀爬步态:在横担上攀爬时应采用能耗较小的扭转式步态,但是在主材表面攀爬时两种步态能耗接近,需考虑障碍类型选取合适的步态.仿真结果为机器人的攀爬步态规划及控制策略提供了依据,同时样机试验结果也验证了两种攀爬步态的可行性.
编辑推荐下载
格式:pdf
大小:363KB
页数:6P
人气:76
 4.4
4.4
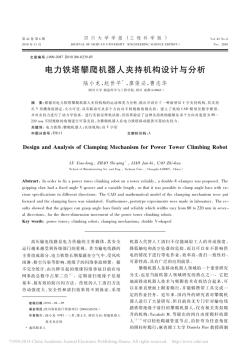
电力铁塔攀爬机器人夹持机构设计与分析 根据对电力铁塔攀爬机器人夹持机构的运动和受力分析,提出并设计了一种新型双v字夹持机构,其夹持爪v形槽角度固定,大小可变,双爪联动可从多个方向对不同规格角钢夹持。建立了机构cad模型及数学模型,并对夹持力进行了动力学仿真。进行实验室样机试验,其结果验证了这种夹持机构能够从多个方向对宽度为80~220mm不同规格的角钢进行可靠夹持,为攀爬机器人在电力铁塔移动提供可靠的夹持力。
格式:pdf
大小:335KB
页数:3P
人气:76
4.6
电力铁塔攀爬机器人直线推杆机构设计与分析 面向输电系统检测及维护作业的自动化,提出并设计了一种可以在电力铁塔表面自由移动的五自由度双臂关节式攀爬机器人,以期代替人工完成危险的高空攀爬检测作业任务。该电力铁塔攀爬机器人机构紧凑,左右机构对称,创新采用直线推杆机构实现两臂张合功能,此机构可良好支撑机器人双臂,相比传统关节设计采用的大转矩电机直驱方式,大幅度降低了对驱动电机的转矩要求。建立了机构cad模型。进行了静力学分析,并在动力学仿真软件adams软件环境下进行仿真。通过和电机直驱关节方法比较,分析和仿真结果均表明采用直线推杆机构可减小驱动电机转矩。样机试验结果表明电力铁塔攀爬机器人系统的设计组成原理合理,系统方案成功可靠。
热门文档 攀爬电力铁塔机器人爬行方案设计

格式:pdf
大小:284KB
页数:4P
人气:76
4.8
电力铁塔攀爬机器人位姿综合误差分析 针对实验室现有电力铁塔攀爬机器人,分析了影响其位姿精度的主要因素,充分考虑了机器人的基本误差(静态误差和动态误差)以及机器人移动基座偏角误差,建立了机器人的位姿误差分析模型。并依据所建立的机器人误差模型,在matlab中进行了分析计算,得到由静态误差、基座偏角误差和动态误差所引起的机器人末端位姿误差,并对多种因素所引起的机器人末端位姿误差进行综合得到机器人的综合位姿误差,这为机器人误差补偿提供了理论依据。

格式:pdf
大小:263KB
页数:5P
人气:76
4.6
蠕行式仿生变直径杆爬行机器人的设计 设计研发了一种利用电机驱动凸轮机构、曲柄连杆机构、摆杆机构等实现在变直径杆上攀爬的非智能的蠕行式仿生爬杆机器人。在对机器人灵巧的结构和工作原理作出说明的基础上,进行了运动学建模和仿真分析。实验表明,该机器人爬行稳定,工况好。
精华文档 攀爬电力铁塔机器人爬行方案设计
格式:pdf
大小:75KB
页数:2P
人气:76
4.5
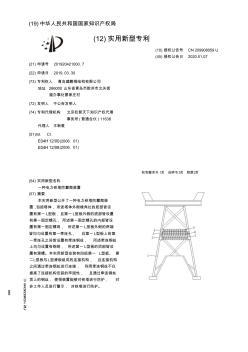
(19)中华人民共和国国家知识产权局 (12)实用新型专利 (10)授权公告号 (45)授权公告日 (21)申请号201920421000.7 (22)申请日2019.03.30 (73)专利权人青岛建鹏钢结构有限公司 地址266000山东省青岛市胶州市北关街 道办事处曾家庄村 (72)发明人不公告发明人 (74)专利代理机构北京权智天下知识产权代理 事务所(普通合伙)11638 代理人王新爱 (51)int.cl. e04h12/00(2006.01) e04h12/08(2006.01) (54)实用新型名称 一种电力铁塔防攀爬装置 (57)摘要 本实用新型公开了一种电力铁塔防攀爬装 置,包括塔体,所述塔体外侧棱角处的底部皆设 置有第一l型板,且第一l型板外侧的底部皆设置 有第一固定螺孔,所述第一固定螺孔的内部皆设
格式:pdf
大小:902KB
页数:12P
人气:76
4.4

-1- 2050单词,10500英文字符,3650汉字 出处:miyaket,ishiharah,shojir,etal.developmentofsmall-sizewindow cleaningrobotbywallclimbingmechanism[j].isarcproceedings,2006. small-sizewindowcleaningrobotbywall climbingmechanism 1.introduction recently,therehavebeenmanydemandsforautomaticcleaningsystemon outsidesurfaceofbuildingssuchaswindowglassbyincreasingof
格式:pdf
大小:78KB
页数:2P
人气:76
4.3
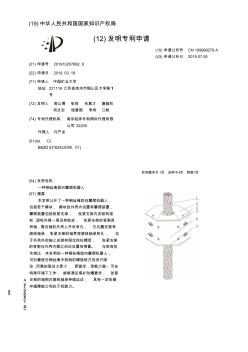
(19)中华人民共和国国家知识产权局 (12)发明专利申请 (10)申请公布号 (43)申请公布日 (21)申请号201910207682.6 (22)申请日2019.03.19 (71)申请人中国矿业大学 地址221116江苏省徐州市铜山区大学路1 号 (72)发明人周公博 张岗 朱真才 唐超权 何贞志 杨善国 李伟 江帆 (74)专利代理机构南京经纬专利商标代理有限 公司32200 代理人马严龙 (51)int.cl. b62d57/024(2006.01) (54)发明名称 一种钢丝绳捻向攀爬机器人 (57)摘要 本发明公开了一种钢丝绳捻向攀爬机器人, 包括若干模块,模块的外壳内设置有攀爬装置, 攀爬装置包括张紧支架,张紧支架内安装有滚 轮,滚轮外缘一周设有胶皮,张紧支架的背侧具 有轴,靠近轴的外壳上开设有孔,
格式:pdf
大小:1.0MB
页数:3P
人气:76
4.6
电力铁塔焊接机器人可行性研究 本文阐述了焊接机器人在电力铁塔行业中应用的目的和意义,分析了焊接机器人在电力铁塔行业中应用的理论和实践依据,并给出了焊接机器人在电力铁塔行业中应用的研究内容和实施方案。
格式:pdf
大小:352KB
页数:3P
人气:76
4.7
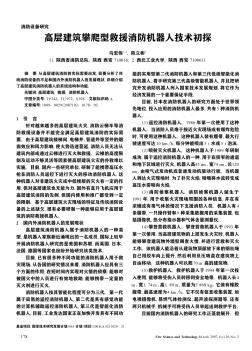
从高层建筑消防的实际需要出发,简要分析了传统消防设备的不足和国内外消防机器人的发展现状,详细介绍了高层建筑消防机器人的系统结构和功能。
最新文档 攀爬电力铁塔机器人爬行方案设计
格式:pdf
大小:411KB
页数:3P
人气:76
4.4
铁塔攀爬机在大跨越塔上的应用研究 铁塔攀爬机在大跨越塔上的应用研究是安徽省电力公司超高压公司在对国内铁塔升降设备状况调研的基础上,与中国电力科学研究院合作进行的应用研究科技项目。该项目成功地将铁塔攀爬机应用于已建成的500kv蚌埠淮河大跨越塔上,改善了作业人员登塔工作条件,提高了运行、检修和抢修的快速反应能力,降低了塔上工作的安全风险和登塔作业人员的劳动强度,提升了线路运行装备的技术水平。该项目获安徽省电力公司2010年度科技进步二等奖。该项目的成功实施,体现了国家电网人性化管理,创造和谐社会的思路;为不设电梯的大跨越塔及特高压线路高塔的攀登提供了新的解决办法和思路。
格式:pdf
大小:10KB
页数:1P
人气:76
4.5
2018年3月 第46卷第5期 机床与液压 machinetool&hydraulics mar.2018 vol.46no.5 doi:10.3969/j.issn.1001-3881.2018.05.010 收稿日期:2016-10-28 作者简介:严峥晖(1977—),男,土家族,硕士,副教授,研究方向为嵌入式与物联网。e-mail:331607064@qq.com。 爬行式圆钢避雷针状态检测机器人设计 严峥晖 (贵州电子信息职业技术学院,贵州凯里556000) 摘要:为对圆钢式避雷针表面状态进行有效检测,预防表面缺陷可能造成的断裂、倒塌事故,设计一种爬行式圆钢避 雷针状态检测机器人。机器人采用爬行臂带动滚轮的驱动方式,对于法兰凸起以及不同尺寸的杆径具有良好的通过性。利 用无线技术,实现对机器人多种工作方式的遥控
格式:pdf
大小:1.2MB
页数:2P
人气:76
4.4
金融街e10工程塔吊防攀爬措施 1、工程概况 本工程位于阜成门内大街,金融大街与民康胡同的交汇口处。本 工程结构形式为框架剪力墙结构,地下四层,地上十层,建筑高度 45米。本工程选用k40/26塔吊一台,臂长45米,位于基坑中部。 2、编制目的 为保证工地施工安全,维护当前和谐、稳定的政治局面,营造安 定、团结的施工氛围,防止外来人员及不法分子潜入工地,恶意攀爬 塔吊以制造事端,项目部特拟定此塔吊防攀爬措施,以保证施工安全。 3、防攀爬措施 本工程塔吊防攀爬措施为在塔身中部(距基坑底部20米处)采 用4米长木跳板将塔身完全封闭,仅留中间爬梯。跳板每边向外悬挑 出1米宽。塔身爬梯处安装铁栅栏门,栅栏门上锁。塔吊司机上下塔 吊后均要对栅栏门上锁。栅栏门钥匙塔吊司机保管一把,其余钥匙由 安全环境管理部保管。 4、防攀爬照片 中建八局金融街e10项目部 2010年
格式:pdf
大小:1.2MB
页数:13P
人气:76
4.6
.................................. 专业技术word资料下载可编辑 国家电网铁塔监控系统 解 决 方 案 范文范例学习指导 word整理版 第1章系统概述...........................................................................................................................................3 1.1系统简介................................................................................................................
格式:pdf
大小:699KB
页数:6P
人气:76
4.5
新型除锈爬壁机器人附壁建模与仿真 设计了1种永磁真空混合附壁的船舶壁面除锈爬壁机器人,该机器人负载大、本体重,机器人的附壁面法向存在水射流反冲力和真空负压压力。建立了机器人下滑和后翻两静态模型,结合船壁面法向的3种受力状态,分别对下滑模型和后翻模型进行了分析,并将两模型永磁单元所需吸附力进行了对比。仿真和实验结果表明,真空负压提高机器人附壁能力明显,可以较大地降低永磁吸附单元所需吸附力,减小机器人负载,较低的真空负压可实现辅助永磁良好附壁,在保证灵活运动的前提下吸附可靠。
格式:pdf
大小:142KB
页数:未知
人气:76
4.8
电力铁塔攀爬机器人 该作品的攀爬检测对象高压电力铁塔普遍存在于复杂的地理环境中。其检修难度大且危险性高,针对目前国内外日益突出的电网维护现状,提出一种能够代替人工用于铁塔检测的攀爬机器人。检测范围包括铁塔表面是否有锈迹,角钢内部是否有断裂及腐蚀,导线是否有断股。绝缘子和线夹是否有损坏等。
格式:pdf
大小:127KB
页数:2P
人气:76
4.5
水泥杆攀爬机器人机械结构设计 在生产生活中,有很多安装及维修等工作需要爬杆作业,冬季温差昼夜明显,使水泥杆塔结了一层冰或者霜,人工爬杆无法实现。设计一款爬杆机器人由曲柄滑块机构、并联盘形凸轮机构、移动凸轮机构以及上下机械手爪等组成,通过弹簧的预紧力来实现机器人手爪对杆的抱紧,通过曲柄滑块机构、凸轮机构等实现攀爬动作,同时机器人只需一个驱动源就能带动整个机器人的运动,能攀爬变直径的杆,工作简单可靠,运动灵活,可以广泛应用于很多爬杆作业。
格式:pdf
大小:90KB
页数:1P
人气:76
4.5
一种爬行式避雷针检测机器人设计理念 为对圆钢式避雷针表面状态进行有效检测,预防表面缺陷可能造成的断裂、倒塌事故,设计一种爬行式圆钢避雷针状态检测机器人,对其设计要求、功能实现和基本结构进行了初步设计。
格式:pdf
大小:142KB
页数:未知
人气:76
4.7
活塞式铁塔攀爬机器人 活塞式铁塔攀爬机器人是针对常规电力铁塔复杂3d环境的检测和维护工作而设计的。它创新地采用了两爪攀爬和三爪横移的移动策略,利用气压动力驱动气压元件来实现机器人的攀爬动作。在一定程度的稳定性上有效地实现了机器人的快速攀爬。
格式:pdf
大小:292KB
页数:未知
人气:76
4.5
储罐爬壁机器人的喷漆机构设计及ADAMS仿真 为提高储罐爬壁机器人的喷漆质量及工作效率,研究了一种可实现z字形轨迹的喷漆机构。该机构以爬壁机器人为载体,通过与机器人运动的协同控制,能够实现良好的喷漆效果,具有喷枪高度、间距及喷射角度调节等功能,该机构便于实现大型储罐表面的各种自动化喷漆作业。分析了机构实现原理,完成整体结构设计,利用adams软件建立喷漆机构的虚拟样机模型并进行运动学仿真,验证了设计方案的可行性。
文辑创建者
我要分享 >
职位:主任结构工程师
擅长专业:土建 安装 装饰 市政 园林
相关编辑
文辑推荐
知识推荐
百科推荐