天文用大口径定制快门驱动器设计和测试
2025-03-21
天文用大口径定制或自制快门需要用户自己制作驱动器并进行综合测试以确定其参数。介绍了一种快门驱动器电路设计、仿真分析、制作过程以及测试的基本情况;提出了一种大口径快门时间测试和参数归算的方法,进行了实际测试,并以列表的形式给出了具体的归算结果。分析表明,该快门驱动器能够满足长曝光天文观测对大口径快门控制的基本要求。指出了存在的问题,并提出了改进的建议。

 大口径望远镜主镜能动支撑驱动器的个体设计和性能测试
大口径望远镜主镜能动支撑驱动器的个体设计和性能测试 大口径望远镜主镜由于体积和质量过大,产生镜面面形变化而影响观测质量。为即时修正面形,现提出了一套力驱动器系统,利用多个该系统组成的能动支撑系统可以对镜体作用达到修正目的。采用了电机、减速器、滚珠丝杠、弹簧组为主要部件,配合传感器和控制器构成了力驱动器系统,并进行了性能实验。实验结果表明,驱动器能够达到设计要求。

led灯驱动器的噪声试验 一、项目介绍 本项目要求选定合适的测试位置测试被测产品的a计权声压级。 二、试验相关说明 1、样品描述: 图一为被测产品 2、本次试验依据的基础方法标准为:energystarprogramrequirements productspecificationforlamps:noise及测试公司要求的行业标准。 3、试验说明 3.1气候条件 温度:20℃±5℃ 湿度:50%±20% 3.2将测试产品放置在平台上通过胶布将其分别固定在距离麦克风0cm,1cm, 5cm,10cm处进行噪声测试。 3.3待驱动器稳定工作后,测试并记录各测点不同亮度、不同负载条件下的a计 权平均声压级。 三、测试现场 图一、测量时麦克风距离led驱动器为0cm 图二、测量时麦克风距离led驱动器为1cm 图三、测量时麦克风距离
编辑推荐下载
格式:pdf
大小:26KB
页数:1P
人气:84
 4.5
4.5

jn-2160永磁开关驱动器调试方法 工艺适用范围:文件名为jn-2160永磁开关驱动器(板号为853688) 准备工作:开关电源(5w以上,具有短路保护功能,输出电压24v以上),万用表。2个按 钮。 一、单线圈驱动器调试方法(四个igbt) 按上图接好线后,按下an1,万用表示数为正电,电压范围为13v~15v;按下an2,万用表 示数为负电,电压范围为-13v~-15v。 二、双线圈驱动器调试方法(两个igbt) 测试时使用两块万用表,按下an1,接h+的万用表示数为正电,电压范围为13v~15v;按下 an2,h-的万用表示数为正电,电压范围为13v~15v。注意在不操作的时候万用表也有示数, 大概1v左右,为正常现象。 按以上方法测试合格后,线路板背面要刷三防漆。 hz 24v 24v fz v+ v- c- c+ h+
热门文档 天文用大口径定制快门驱动器设计和测试
格式:pdf
大小:87KB
页数:4P
人气:84
4.7
路灯照明应用方案 一、概述 路灯驱动器是专门针对led路灯的照明特点研制的一款led照明驱动器。驱 动器内置微处理器,可实现照度开关控制、人体感应控制、亮度调节等自动控制 功能。 二、功能描述 1)照度控制 在白天或光线较强时,自动关灯;在夜晚或光线较弱时,自动开灯。 2)人体感应控制 在照度控制开关的情况下,由红外感应进一步控制路灯的照度值,具体根据 现场对照度的需要,可通过软件灵活设定多种控制输出,如:无人时不开灯,有 人时开灯;无人时50%(可在30%~100%之间任意设定)亮度,有人时全亮(100% 亮度),人走后延时30s(缺省值,具体值可由软件灵活调整设定成用户期望值) 后降到50%亮度,提供基本照度照明。 3)光衰补偿 led模组的驱动电源采用电流源驱动方案,确保流过led模组的工作电流严 格控制在额定电流以下,使led芯片不会因使用中的舜间
格式:pdf
大小:6.7MB
页数:37P
人气:84
4.4

伺服驱动器快速入门指南 gthd快速入门手册 版权声明 固高伺创动技术(深圳)有限公司 保留所有权力 固高伺创动技术(深圳)有限公司(以下简称固高伺创)保留在不事先通知的情况下,修改本 手册中的产品和产品规格等文件的权力。 固高伺创不承担由于使用本手册或本产品不当,所造成直接的、间接的、特殊的、附带的或相 应产生的损失或责任。 固高伺创具有本产品及其软件的专利权、版权和其它知识产权。未经授权,不得直接或者间接 地复制、制造、加工、使用本产品及其相关部分。 联系我们 固高伺创动技术(深圳)有限公司 地址:深圳市高新技术产业园南区深港产学研基地西座二楼w201室 电话:0755-26977857 传真:0755-26970843 电子邮件:huang.yue@googoltech.com 文档版本 版本号修订日期 r1.02016年01月26日 gthd快速入门手
格式:pdf
大小:1.1MB
页数:6P
人气:84
4.7
超磁致伸缩换能器驱动器设计 稀土超磁致伸缩换能器是一种新型的可控震源。本论文针对稀土超磁致伸缩换能器并结合浅层地震勘探的特点,研制了稀土超磁致伸缩换能器驱动器。该驱动器由计算机pci总线fpga信号发射卡、igbt驱动器、igbt逆变器及电源组成。由该驱动器和稀土超磁致伸缩换能器组成震源系统,将其应用于浅层地震勘探模型试验中,取得了良好的效果。
格式:pdf
大小:218KB
页数:2P
人气:84
4.5
led照明驱动器设计案例精解 链接:www.***.***/baike/1907.html led照明驱动器设计案例精解 内容简介 led作为第三代照明技术,具有节能、环保、安全可靠等特点。本书结合led的实际应用,详细介绍了led驱动器 的设计方法与技巧。具体包括led射灯、led日光灯、led台灯、led路灯、景观照明等灯具的驱动器设计,书中所 有的实例都可以应用在生产中。书中还给出了大量led照明驱动器设计电路,读者完全可根据这些电路原理囤结合实 际的要求设计出性价比高的产品。 本书可供从事led研究与应用的工程技术人员参考使用,也可作为职业院校电子、电工专业师生的辅助教材和课外 读物。 目录 第一章led照明知识 1.1led的工作原理 1.1.1led与传统光源的不同发光机理 1.1.2led发光器件的结构特点 1
格式:pdf
大小:719KB
页数:5P
人气:84
4.5
谐振式超磁致伸缩音频驱动器设计 超磁致伸缩驱动器具有输出振幅过小导致转换效率不高的问题,针对此问题提出了谐振式超磁致伸缩音频驱动器的理念,利用音叉的机械结构实现了超磁致伸缩驱动器振幅的放大,同时利用音叉的频响曲线去修正超磁致伸缩驱动器的频响曲线,以提升扬声器响度。研究了音叉的选择,及其中超磁致伸缩驱动器的具体设计过程,并在专业消音室对谐振式超磁致伸缩音频驱动器进行了性能测试,测试结果表明驱动器改进后超磁致伸缩扬声器在音响上有显著提升。
精华文档 天文用大口径定制快门驱动器设计和测试

格式:pdf
大小:416KB
页数:4P
人气:84
4.5
总线LVDS驱动器电路设计 提出了一种用于多点数据传输的blvds(buslowvoltagedifferentialsignal)驱动器电路设计。设计中将电压模式驱动器电路和双电流源模式驱动器电路相结合实现多点数据传输,既充分利用了lvds技术高速、低功耗和低噪声的优点,又解决了传统的lvds驱动器电路只能用于点对点应用,不能用于总线数据传输的问题。仿真结果表明,该blvds驱动器电路的传输速率可达100mbps,电气性能指标符合tia/eia-899协议标准的要求。
格式:pdf
大小:1.2MB
页数:36P
人气:84
4.5
哈尔滨理工大学学士学位论文 -i- 电磁驱动器的设计与分析 摘要 随着电磁驱动的发展,电磁驱动已经应用到现在的各行各业。小到孩童 时代的四驱车马达,大到工业应用的驱动装置,电磁驱动越来越被人们所重 视。 电磁驱动之所以被人们所关注,也是主要由于其动能转化的机械低磨损 率,机械磨损率的降低,一方面可以有效地降低工业设备维护的成本,一方 面也有效地控制动能转化的效率。而且电磁驱动作为一个新能源,其低碳的 理念也和可持续发展的战略紧扣。因此,电磁驱动的发展是一个顺应潮流的 趋势。 本文主要介绍了电动机的国内外发展现状,电磁学的发展历程,进而延 伸到一些基本的电磁学现象,从而了解电磁驱动器的工作原理以及由电磁驱 动原理而来的一些技术应用,最后制作一个电磁驱动演示仪用来进行电磁驱 动相关的数据收集。 关键词电磁驱动;感应电机;电磁学 哈尔滨理工大学学士学位论文 -ii- the
最新文档 天文用大口径定制快门驱动器设计和测试
格式:pdf
大小:375KB
页数:4P
人气:84
4.4
收稿日期:2006203216; 定稿日期:2006205226 一种pin开关高速驱动器的设计 陈爱华,陈永任 (中国电子科技集团公司第二十四研究所,重庆 400060) 摘 要: 介绍了一种用于驱动pin开关的高速驱动器的设计。该电路的传输延时为5ns,工作 电压范围±5~±12v。文章详细介绍了高速驱动器加速电路和偏置电路的设计方法,分析了影 响高速驱动器传输速度和工作稳定性的一些因素,提出了克服这些影响的措施。 关键词: pin开关驱动器;传输延时;加速电路;偏置电路 中图分类号: tn431.1 文献标识码: a 文章编号:100423365(2006)0420492203 designofahigh2speeddriverforpin
格式:pdf
大小:724KB
页数:5P
人气:84
4.8
一种PIN开关高速驱动器的设计 介绍了一种用于驱动pin开关的高速驱动器的设计。该电路的传输延时为5ns,工作电压范围±5~±12v。文章详细介绍了高速驱动器加速电路和偏置电路的设计方法,分析了影响高速驱动器传输速度和工作稳定性的一些因素,提出了克服这些影响的措施。
格式:pdf
大小:130KB
页数:2P
人气:84
4.4
太阳能LED路灯驱动器设计 基于恒流限压的功能,设计了一款较低功率的太阳能led路灯驱动器。其硬件电路主要由电源电路,单片机电路,恒流限压控制部分,以及功率部分组成。软件部分利用c语言编写了相应的程序。最终做出实物,经测试能够输出恒定的电流值,且带有限压保护(限压值可调),一旦负载电压达到限压值即进入恒压供电状态,可有效保护负载。
格式:pdf
大小:434KB
页数:4P
人气:84
4.8
16位恒定电流源LED驱动器设计 首先介绍了led驱动器芯片的关键性能参数,并在此基础上阐述了16位恒定电流源led驱动器的工作原理,设计了一种通过调节外接电阻能稳定输出10ma~50ma电流的驱动器。
格式:pdf
大小:1.3MB
页数:3P
人气:84
4.3
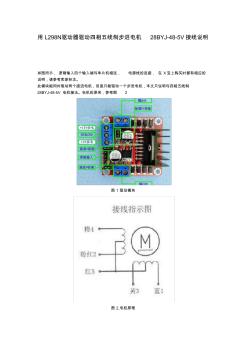
用l298n驱动器驱动四相五线制步进电机28byj-48-5v接线说明 如图所示,逻辑输入四个输入端与单片机相连,电源线的连接,在x宝上购买时都有相应的 说明,请参考卖家标注。 此模块能同时驱动两个直流电机,但是只能驱动一个步进电机,本文只说明与四相五线制 28byj-48-5v电机接法。电机的原来,参考图2 图1驱动模块 图2,电机原理 通过图2电机原理的说明,我们可以进行连线,,如图所示。 找到对应的电机四相的关系,电机的四线(公共端除外)分别接到l298n模块的out1,out2 和out3,out4输出端,其中公共端线接到5v电源。因为本步进电机的额定电压为5v,所 以从单片机引出5v电压接到驱动模块的12v输入口,5v输入口不接电源 如图所示进行连线,此时电机可能出现振动情况,但是不运转,或者只运转一个角度,此时, 拔去
格式:doc
大小:46KB
页数:4P
人气:84
4.5
 LED射灯需要驱动器吗
LED射灯需要驱动器吗 led射灯作为一种常见的照明设备,其工作原理和使用需求是许多用户关注的问题。那么,led射灯是否需要驱动器呢?这是一个涉及到led射灯的工作性能和稳定性的关键问题。下面,我们将深入探讨这个问题,帮助你更好地理解和使用led射灯。
格式:pdf
大小:518KB
页数:未知
人气:84
4.6
磁悬浮微驱动器的定位控制系统设计 针对磁场同步跟随式磁悬浮微驱动器,构建了新型的集驱动、测量和控制于一体的磁悬浮微驱动器定位系统。设计了一套以dsp为核心的硬件控制板的运行软件。采用labview软件实现了上位机的数据采集、显示、分析及保存等功能。以(1.231,1.227)mm、(1.529,1.516)mm两点为目标进行了定位实验。实验结果证明这种定位控制系统的误差在0.001~0.009mm之间,该定位控制系统具有较好的控制精度。
格式:pdf
大小:261KB
页数:4P
人气:84
4.4
电液伺服阀用压电叠堆驱动器动态特性研究 对电液伺服阀用压电叠堆驱动器的动态特性进行了研究。针对所讨论的压电型电液伺服阀结构,建立了压电叠堆驱动器的动态系统模型;根据该模型的传递函数对压电叠堆驱动器进行了时域和频域分析,并仿真分析了系统阻尼系数、系统等效质量、压电叠堆刚度等不同参数对压电叠堆驱动器动态特性和输出位移的影响。仿真结果表明:增大系统阻尼系数、减小系统等效质量和增大压电叠堆刚度可提高驱动器的动态特性和输出位移。该结果为电液伺服阀用压电叠堆驱动器的结构参数优化设计提供了理论依据。
格式:pdf
大小:377KB
页数:未知
人气:84
4.4
使用隔离门驱动器抑制混合动力驱动的电压瞬变(dV/dt)噪声 介绍在设计实用并且可靠的动力驱动电路时工程师经常面临的一个挑战是高共模噪声,共模噪声(commonmodenoise),或称为电压瞬变(dv/dt)噪声,通常由系统中高电压电源间的高频率开关动作产生,本篇文章将讨论混合动力驱动应用中电压瞬变噪声的可能来源并提出建议解决方案。
文辑创建者
我要分享 >
职位:智能化监控及防盗报警工程
擅长专业:土建 安装 装饰 市政 园林
相关编辑
文辑推荐
知识推荐
百科推荐