vb机械课程设计凸轮机构演示主程序带注解
2025-02-27
Const pi As Double = 3.1415926 Const rr As Double = pi / 180 Const rr2 As Double = 180 / pi Public w As Double Public r0 As Double Public h As Double Public tj As Double Const qj = 0 Public tcj As Double Public hcj As Double Public yxj As Double Public sg As Integer Public q As Integer Public xqb As Double Public ii As Integer, jj As Integer, nn As Integer Public zxj As Double Publ

大作业(二) 凸轮机构设计 (题号:7-abc) 班级______________________ 学号______________________ 姓名______________________ 成绩______________________ 同组者______________________ 完成日期2010年12月日 1 目录 凸轮机构设计...................................................................................................................................3 1.题目及原始数据............................................................

1 一、填空题 [1]___________________________决定了从动杆的运动规律。 [2]凸轮机构中,凸轮基圆半径愈___________,压力角愈___________,机构传动性能愈好。 [3]凸轮机构是由___________________、____________________、____________________ 三个基本构件组成的。 [4]凸轮机构中的压力角是指__________________________________________间的夹角。 [5]凸轮机构常用的从动件运动规律有_______________________________, ________________________________________,______________________________
编辑推荐下载
格式:pdf
大小:171KB
页数:14P
人气:80
 4.4
4.4

大作业(二) 凸轮机构设计 (题号:4—b) 班级:机制02班 学号:2010012407(8) 同组人员:杭程光高源 完成日期:2011-11-15 凸轮机构大作业题目 利用计算机辅助设计完成下列偏置式直动滚子推杆盘形凸轮机构(推杆的移 动副导路位于凸轮盘回转中心的右侧)或摆动滚子推杆盘形凸轮机构的设计,设 计已知数据如下表所示,机构中凸轮沿着逆时针方向做匀速转动。 表1两种凸轮机构的从动件运动规律 直动推杆组题号摆动推杆组题号推程运动规律回程运动规律 1—a,1—b,1—c6—a,6—b,6—c等加速等减速运动正弦加速度运动 2—a,2—b,2—c7—a,7—b,7—c余弦加速度运动五次多项式运动 3—a,3—b,3—c8—a,8—b,8—c五次多项式运动等加速等减速运动 4—a,4—b,4—c9—a,9—b,9—c
格式:pdf
大小:325KB
页数:16P
人气:80
4.4

1 大作业(二) 凸轮机构设计 (题号:4-a) (一)题目及原始数据··············· (二)推杆运动规律及凸轮廓线方程········· (三)程序框图········· (四)计算程序················· 2 (五)程序计算结果及分析············· (六)凸轮机构图················· (七)心得体会·················· (八)参考书··················· 一题目及原始数据 试用计算机辅助设计完成偏置直动滚子推杆盘形凸轮机构的设计 (1)推程运动规律为五次多项式运动规律,回程运动规律为余弦加速度运动规 律; (2)打印出原始数据; (3)打印出理论轮廓和实际轮廓的坐标值; (4)打印出推程和回程的最大压力角,以及出现最大压力角时凸轮的相应转角; (5)打印出凸轮实际轮廓曲线的
热门文档 vb机械课程设计凸轮机构演示主程序带注解
格式:pdf
大小:317KB
页数:3P
人气:80
4.8
 基于FPC的凸轮机构公差设计的研究
基于FPC的凸轮机构公差设计的研究 基于一次产品成功fpc(firstproductcorrect)的原理,研究了凸轮公差优化分配的数学模型及其公差优化设计算法,开发了一套凸轮机构公差优化设计的软件,并进行了实例分析计算;结果表明,该方法保证了凸轮机构公差设计一次达到最优,从而实现了一次产品成功
格式:pdf
大小:658KB
页数:16P
人气:80
4.7
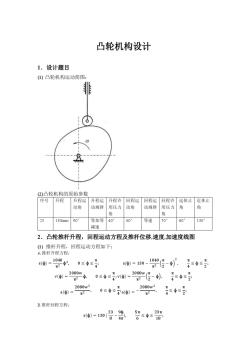
哈尔滨工业大学课程设计说明书(论文) harbininstituteoftechnology 机械原理大作业说明书 课程名称:机械原理 设计题目:凸轮机构设计 院系:能源学院 班级:1002101班 设计者: 学号: 指导教师:赵永强 设计时间:6月10日-6月24日 哈尔滨工业大学 哈尔滨工业大学课程设计说明书(论文) 一、设计题目如右图所示直动从动件盘形凸轮机构,选择一组凸轮机构的原始参数, 据此设计该凸轮机构。 凸轮机构原始参数 序号升程(mm)升程运动角升程运动规律升程许用压力角 27130150正弦加速度30° 回程运动角回程运动规律回程许用压力角远休止角近休止角 100°余弦加速度60°30°80° 二.凸轮推杆升程、回程运动方程及推杆位移、速度、加速度线图 凸轮推杆升程运动方程:)] 5 12 sin(

格式:pdf
大小:33KB
页数:2P
人气:80
4.7

机械原理大作业任务书 大作业2凸轮机构设计 1.设计题目 如图2-1所示直动从动件盘形凸轮机构,其原始参数见表2-1。从表2-1中选择 一组凸轮机构的原始参数,据此设计该凸轮机构。 表2-1凸轮机构原始参数 升程 (mm) 升程运 动角 () 升程运 动规律 升程 许用 压力角 () 回程运 动角 () 回程运 动规律 回程 许用 压力角 () 远休 止角 () 近休 止角 () 50150正弦加速度40100余弦加速度60 2.凸轮机构的设计要求 (1)确定凸轮推杆升程、回程运动方程,并绘制推杆位移、速度、加速度线图; (2)绘制凸轮机构的ss d d 线图; (3)确定凸轮基圆半径和偏距; (4)确定滚子半径; 图2-1 机械原理大作业任务书 (5)绘制凸轮轮廓曲线。 3.要求提交的设计文件 (1)机构运动简图1张,凸轮轮
精华文档 vb机械课程设计凸轮机构演示主程序带注解
格式:pdf
大小:1.0MB
页数:22P
人气:80
4.6
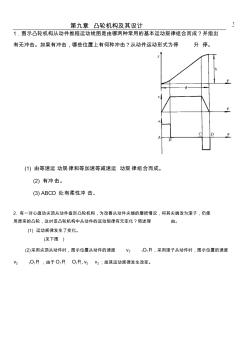
第九章凸轮机构及其设计1 1.图示凸轮机构从动件推程运动线图是由哪两种常用的基本运动规律组合而成?并指出 有无冲击。如果有冲击,哪些位置上有何种冲击?从动件运动形式为停升停。 (1)由等速运动规律和等加速等减速运动规律组合而成。 (2)有冲击。 (3)abcd处有柔性冲击。 2.有一对心直动尖顶从动件盘形凸轮机构,为改善从动件尖端的磨损情况,将其尖端改为滚子,仍使 用原来的凸轮,这时该凸轮机构中从动件的运动规律有无变化?简述理由。 (1)运动规律发生了变化。 (见下图) (2)采用尖顶从动件时,图示位置从动件的速度vop2111,采用滚子从动件时,图示位置的速度 vop2111,由于opopvv111122,;故其运动规律发生改变。 第九章凸轮机构及其设计2 3.在图示的凸轮机构中,画出凸轮从图示位置转过6
格式:pdf
大小:304KB
页数:3P
人气:80
4.8
某圆柱凸轮机构中凸轮凹槽轮廓线的反求设计 以某矿所使用的圆柱凸轮机构中的凸轮凹槽轮廓线的设计为例,简单介绍了反求设计的分析理论和设计方法,并用运动分析软件证明了反求设计的分析理论和设计方法的可行性。
格式:pdf
大小:215KB
页数:未知
人气:80
4.7
某圆柱凸轮机构巾凸轮凹槽轮廓线的反求设计 以某矿所使用的圆柱凸轮机构中的凸轮凹槽轮廓线的设计为例.简单介绍了反求设计的分析理论和设计方法,并用运动分析软件证明了反求设计的分析理论和设计方法的可行性。
格式:pdf
大小:256KB
页数:4P
人气:80
4.7
偏心旋转-摆动式凸轮机构设计 运用极坐标矢量法对一种偏心旋转—摆动式凸轮机构的凸轮轮廓曲线进行了设计计算。首先,将机构中的构件用极坐标矢量来表示;然后,根据凸轮机构的矢量图,由从动件的运动规律逐步推导出凸轮从动滚子的运动规律;最后,由从动滚子的运动规律求解出凸轮的实际轮廓。这种方法具有计算精确的特点,能够完成具有复杂运动从动件的凸轮机构的设计。
最新文档 vb机械课程设计凸轮机构演示主程序带注解
格式:pdf
大小:382KB
页数:15P
人气:80
4.8

1 harbininstituteoftechnology 机械原理大作业二 课程名称:机械原理 设计题目:凸轮机构设计 2 一.设计题目 设计直动从动件盘形凸轮机构, 凸轮机构原始参数 序 号 升程 (mm) 升程 运动 角 (o) 升程运 动规律 升程 许用 压力 角(o) 回程 运动 角 (o) 回程运 动规律 回程 许用 压力 角 (o) 远休 止角 (o) 近休 止角 (o) 2212090等加等减速4080等减等加速7070120 二.凸轮推杆运动规律 1.运动规律(等加速等减速运动) 推程 0 450 2 2 2 0 960 2hs 22 0 19204h v 2 2 2 0 2 19204h a 推程 00 9045 2 2 2 02 0 ) 2 ( 960 120 2h hs 3 ) 2 ( 19204 202 0
格式:pdf
大小:209KB
页数:6P
人气:80
4.7
harbininstituteoftechnology 机械原理大作业(二) 课程名称:机械原理 设计题目:凸轮机构设计 院系: 班级: 设计者: 学号: 设计时间:2012.6.24 哈尔滨工业大学 一、设计题目 如图2-1所示直动从动件盘形凸轮机构,其原始参数见表2-1。从表2-1中选择一组凸 轮机构的原始参数,据此设计该凸轮机构。 表2-1凸轮机构原始参数 升程(mm)升程运动角 () 升程运动规 律 升程许用压 力角() 回程运动 角() 回程运动规 律 回程许用压 力角() 远休止 角() 近休止角 () 50120余弦加速度3590等减等加速656090 二、凸轮推杆升程、回程运动方程及推杆位移、速度、加速度线图 1.推杆升程运动方程(02/3) 升程采用余弦加速度运动规律,故将已知条件0=12
格式:pdf
大小:127KB
页数:2P
人气:80
4.7
基于凸轮机构的电动葫芦限位装置研究 在电动葫芦中,常出现因限位故障而引发的安全事故,造成企业人员伤亡和经济损失。本文作者通过较长时间的研究和论证,应用机械学科中凸轮机构工作原理,设计出一种适用于电动葫芦限位的凸轮机构限位装置,其稳定性好,可达到安全限位目的,供同行参考。
格式:pdf
大小:264KB
页数:未知
人气:80
4.6
凸轮机构在电动弹簧操动机构中的作用 1.前言真空断路器的操动机构主要有两种形式:以直流电磁铁作为合闸动力源的操动机构是电磁操动机构;以弹簧作为合闸动力源的是电动弹簧操动机构。电动弹簧操动机构由小功率交流或直流电动机为弹簧储能,而后利用弹簧释放的能量对断路器进行分、合闸操作。由于它对电源要求不高,合闸力不受电源电压的影响,工作恒定,易于产品系列
格式:pdf
大小:398KB
页数:2P
人气:80
4.7
直动从动件平面凸轮机构压力角与瞬时效率 根据直动平面凸轮机构瞬时效率曲线和压力角曲线的对比,以及对凸轮机构瞬时效率公式的分析,给出了压力角和凸轮机构瞬时效率之间的正确关系
格式:pdf
大小:463KB
页数:14P
人气:80
4.3
机械原理课程设计说明书 题目:摆式送料机构总体设计 姓名:冯帅 学号: 专业: 班级: 学院:交通与车辆工程学院 指导教师: 2013年7月9日 机械原理课程设计摆式送料机构总体设计 1 目录 第一章机械原理课程设计指导书.....................................................2 一.机械原理课程设计的目的...........................................................2 二.机械原理课程设计的任务...........................................................2 三.课程设计步骤..........................................
格式:pdf
大小:207KB
页数:3P
人气:80
4.8
关于正置式凹弧底直动推杆盘形凸轮机构的探讨 以凹圆弧底直动从动件盘形凸轮机构为对象,通过将二者进行对照比较研究,较为系统、深入地讨论了压力角公式、机构基本尺寸确定、凸轮工作轮廓设计、从动件弧底推程、回程轮廓工作段确定和机构滑动系数公式等一系列机构分析与设计问题。
格式:pdf
大小:663KB
页数:4P
人气:80
4.7
摆直动从动件空间凸轮机构压力角统一数学表达式研究 针对摆直动从动件空间凸轮机构性能参数缺乏有效通用分析计算模型的情况,提出一种基于统一几何特征与运动特性的空间凸轮机构压力角表达式建模方法.以圆锥凸轮机构为研究对象,推导出基于统一数学表达的摆直动从动件圆锥凸轮机构压力角解析表达式.数值计算验证了模型的正确性,为空间凸轮机构性能参数的分析计算提供了理论基础,所建立的数学模型可推广应用到其他类型凸轮机构.
格式:pdf
大小:57KB
页数:3P
人气:80
4.6
直角坐标系下滚子摆动从动件盘形凸轮机构压力角的计算 推出了直角坐标系下滚子摆动从动件盘形凸轮机构压力角的计算公式。它可用于从动件与凸轮的不同布置形式和不同转向。
格式:pdf
大小:130KB
页数:18P
人气:80
4.6
牛头刨床导杆机构的运动分析 目录 1设计任务及要求,,,,,,,,,,, 2数学模型的建立,,,,,,,,,,, 3程序框图,,,,,,,,,,,,,, 4程序清单及运行结果,,,,,,,,, 5设计总结,,,,,,,,,,,,,, 6参考文献,,,,,,,,,,,,,, 机械原理课程设计任务书(一) 姓名郭娜专业机械工程及自动化班级机械08-3班学号0807100305 一、设计题目:牛头刨床导杆机构的运动分析 二、系统简图: 棘轮 工作台 电动机 a b c d feo o 4 56 7 11 3 8o' o"o2 1 4 o91 9 10 工件 z' z" z1z21 2 n2 3 456 7 8 9 1011 12 8' 1' 1 27' c b a 1 2 3 4 56 h/ 2 n 2 三、工作条件 已知:曲柄每
文辑创建者
我要分享 >
职位:港口与巷道监理工程师
擅长专业:土建 安装 装饰 市政 园林
相关编辑
文辑推荐
知识推荐
百科推荐