新型船舶壁面除锈爬壁机器人动力学建模与分析
2025-01-20
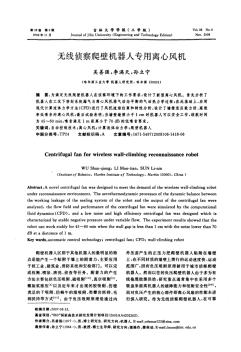
设计一种履带式永磁真空混合吸附的船舶壁面除锈爬壁机器人,该机器人具有负载大、本体重特点,且机器人负载质量以及重心位置随爬壁高度变化。根据机器人爬壁运动原理,建立机器人沿船舶壁面上爬和转弯的动力学模型,运用模糊优化理论对模型进行优化和仿真分析,规划机器人的安全工作范围,分析机器人在典型爬壁高度下的驱动上爬能力,讨论在理论转矩、最大转矩和额定转矩下的机器人上爬的高度与角度关系,研制试验样机进行爬壁转弯试验、定负载上爬试验和变负载上爬试验。仿真和试验结果表明,机器人动力学优化模型可靠,运动性能受永磁吸附力、真空力、射流反击力等影响很小,而受本体重力、爬壁高度和壁面倾角影响较大,所规划的机器人安全工作范围合理。

 新型除锈爬壁机器人附壁建模与仿真
新型除锈爬壁机器人附壁建模与仿真 设计了1种永磁真空混合附壁的船舶壁面除锈爬壁机器人,该机器人负载大、本体重,机器人的附壁面法向存在水射流反冲力和真空负压压力。建立了机器人下滑和后翻两静态模型,结合船壁面法向的3种受力状态,分别对下滑模型和后翻模型进行了分析,并将两模型永磁单元所需吸附力进行了对比。仿真和实验结果表明,真空负压提高机器人附壁能力明显,可以较大地降低永磁吸附单元所需吸附力,减小机器人负载,较低的真空负压可实现辅助永磁良好附壁,在保证灵活运动的前提下吸附可靠。
履带式磁动力爬壁机器人本体设计 机器人在工业中的应用越来越广泛,随着科技进步,爬壁机器人成为了机器人领域的一个重要分支。设计了一种磁动力爬壁机器人,利用磁力作为驱动力,可实现机器人在工业设备内外壁上的竖直攀爬,用于工业设备内外壁检修、清理,可以节约人力、物力,提高工作效率,从而实现工厂的节能减排。
编辑推荐下载
格式:pdf
大小:533KB
页数:未知
人气:76
 4.4
4.4
柔顺关节并联机器人动力学建模与控制研究 对具有大范围运动特性的柔顺关节并联机器人开展了动力学建模、特性分析、控制策略设计及动态性能分析等研究。基于伪刚体法,研究柔顺关节特性,建立含大变形柔顺关节的系统模型,应用拉格朗日方法建立了系统动力学方程。为补偿柔顺关节引起的系统振动、未建模动态以及惯性参数摄动造成的模型误差,设计趋近律滑模控制策略并证明了其稳定性。仿真结果验证了动力学模型和控制策略的有效性。
格式:pdf
大小:292KB
页数:未知
人气:76
4.5
储罐爬壁机器人的喷漆机构设计及ADAMS仿真 为提高储罐爬壁机器人的喷漆质量及工作效率,研究了一种可实现z字形轨迹的喷漆机构。该机构以爬壁机器人为载体,通过与机器人运动的协同控制,能够实现良好的喷漆效果,具有喷枪高度、间距及喷射角度调节等功能,该机构便于实现大型储罐表面的各种自动化喷漆作业。分析了机构实现原理,完成整体结构设计,利用adams软件建立喷漆机构的虚拟样机模型并进行运动学仿真,验证了设计方案的可行性。
热门文档 新型船舶壁面除锈爬壁机器人动力学建模与分析
格式:pdf
大小:95KB
页数:4P
人气:76
4.5
履带式磁吸附爬壁机器人喷漆机的设计 本文讨论了用履带式磁吸附爬壁机器人实现喷漆的问题,阐述了喷漆机构运动的实现以及如何保证喷漆连续条件。设计了可工作于平面和弧面的喷漆机构,并且在罐壁上进行了实验,达到了预期的效果。
格式:pdf
大小:273KB
页数:未知
人气:76
4.8
水平滑块式三杆并联机器人动力学建模与分析 用拉格朗日方法对创新的3ptt型水平滑块式三杆并联机器人机构进行了动力学建模,为该机器人的控制提供了基础·还利用动力学模型对该机器人的可操作性和动力学特性进行了分析,分析结果证明,该机器人在工作空间内部,其加速特性和动态特性良好,而在工作空间边缘,加速特性和动态特性变差·滑块驱动力随平台重量增加而增加,加速时间应适当,且磨削力对滑块驱动力也有影响·该新型并联机器人动力学性能良好,具有很好应用价值·
格式:pdf
大小:3.7MB
页数:5P
人气:76
4.6
走钢丝机器人姿态动力学建模与模糊滑模控制 对走钢丝机器人姿态的模糊滑模控制问题进行了研究。在静力学分析的基础上,利用拉格朗日方法建立了走钢丝机器人的动力学模型,为克服模型的强非线性和模型参数难以测量等实际难题,基于合理的假设,简化出适合于模糊滑模控制技术的系统模型,并根据所建立的模型设计了模糊滑模控制器。matlab仿真表明,所提出的控制策略有较好的跟踪效果。为了进一步验证控制策略的可行性,进行了实物样机的实验验证,实验和仿真结果基本吻合。
格式:pdf
大小:203KB
页数:未知
人气:76
4.6
立式金属罐足式爬壁机器人的设计 为了提高储油罐壁检测作业的机器人负重能力,设计了一种变磁力吸附多足爬壁机器人。该爬壁机器人由运载平台、控制系统和摄像模块组成。运载平台采用变磁力吸附方式的四足结构;控制系统对爬壁机器人的各分系统进行协调和控制,同时完成各系统状态监视和显示;摄像模块主要采集油罐壁面图像。应用表明多足爬壁机器人满足负重作业、吸附可靠的要求。
精华文档 新型船舶壁面除锈爬壁机器人动力学建模与分析
格式:pdf
大小:1.6MB
页数:7P
人气:76
4.3
一种柔索并联机器人的动力学建模与主动控制 柔索并联机器人采用柔索代替连杆作为机器人的驱动元件,它结合了并联结构和柔索驱动的优点。500m口径大射电望远镜(fast)粗调系统是通过六根索长的协调变化使馈源舱作跟踪射电源的六自由度运动,其工作特点类似并联机器人,因此也被看作柔索并联机器人。基于fast5m缩比实验模型,首先进行了逆运动学分析;其次,采用拉格朗日方程建立了柔索并联机器人的逆动力学模型;最后,针对结构特点模拟作用在馈源舱上的随机风荷,设计了用模糊控制器自动调整免疫系统反馈规律的免疫pid控制器来控制馈源轨迹跟踪的风振响应。数值结果验证了该主动控制策略能够有效衰减风荷振动,从而提高了馈源轨迹跟踪精度。
格式:pdf
大小:253KB
页数:4P
人气:76
4.5
针对风电机维护任务的爬壁机器人设计与研究 针对风力发电机检测和维护工作的日益增多,为避免工人高危作业,设计出了一种新型风力发电机检测和维护任务的爬壁机器人。分析了该机器人对风力发电机进行检测和维护工作的实际意义;提出了该机器人的设计技术指标和技术路线,并对机器人的基本功能方案做了重点分析,确定出了机器人的机械本体结构,为防止吸附失效,建立了机器人克服沿壁面脱落、倾覆及吸盘泄漏等几种危险状态下的力学模型,并进行matlab仿真分析,确定出了临界吸附力,为机器人吸附装置的吸附力的确定提供参考依据。
格式:pdf
大小:263KB
页数:5P
人气:76
4.6
小摆角两轮机器人动力学建模及控制器设计 针对现有两轮机器人转弯速度较低问题,提出一种可轴向摆动的新型两轮机器人设计方法.该方法使用连杆控制机构摆动来调整机构的重心分布,实现机器人在小转弯半径条件下稳定运动的目的.基于拉格朗日方程方法,对机器人的小摆角自由度进行了动力学建模与分析,得到了系统动力学模型,并在此基础上设计了一种状态反馈控制器.运用matlab/simulink进行控制器系统仿真,验证了控制器在机器人稳定控制方面的有效性.结果表明,该两轮机器人机构设计思路及运动控制手段可有效提高系统运动稳定性.
格式:pdf
大小:577KB
页数:未知
人气:76
4.4
一种车载式船舶除锈机器人及超高压系统设计 针对目前船舶除锈设备移动不方便、在现场作业存在一定的难度的情况,设计了一种车载式超高压水射流船舶除锈设备,并对除锈机器人的控制驱动系统及受力情况进行分析,提出了选择气马达及磁铁的方法。给出整个系统的设计参数,分析了高压泵组系统、真空回收系统及空气供给系统及系统的控制原理,给出机器人转向过程中的瞬时回转半径的计算公式,便于控制机器人行走。
格式:pdf
大小:176KB
页数:4P
人气:76
4.8
基于双自由度万向轮机构的爬壁机器人运动状态检测 设计了基于双自由度万向轮机构的速度测量装置,该装置由双自由度滚轮、旋转编码器、角位移传感器和水平姿态传感器等构成.机器人运动时,利用水平姿态传感器检测爬行机构的转动角速度,双自由度万向轮机构利用角度传感器测量速度方向,利用光电编码器测量速度大小,实现对机器人运动状态的测量.根据其测量结果,建立了电动机输入和控制点运动状态之间的关系,为机器精确任务操作提供了基础.
最新文档 新型船舶壁面除锈爬壁机器人动力学建模与分析
格式:pdf
大小:411KB
页数:未知
人气:76
4.3
永磁轮式爬壁微机器人尺寸优化设计研究 给出了一种全向的永磁轮式爬壁微机器人。为获得爬壁机器人运动所需力矩和磁力与其尺寸设计之间的关系,研究了其动力学分析方法。结合爬壁机器人自身永磁轮尺寸、永磁轮间距、转向齿轮传输比、底盘半径、所需磁吸附力等设计约束,构造所需驱动力矩最小为目标函数,对其主要尺寸参数进行了优化设计。通过ansoft磁力仿真、pro/engineer机械仿真和matlab计算对爬壁机器人整体尺寸优化设计进行求解。对仿真计算结果进行了分析比较,证明上述设计方法的可行性。
格式:pdf
大小:772KB
页数:4P
人气:76
4.4
舰船除锈喷漆机器人的研究与设计 为了改进舰船修造行业除锈、喷漆工作落后的、传统的人工作业方式,设计了一种具有除锈、喷漆功能的机器人装置。该机器人采用直角坐标和柱坐标相结合的设计方法,通过主从遥控控制或自动轨迹规划控制,能够实现平面和曲面作业。详细介绍了该机器人的本体结构、驱动方式和控制系统构成,并对机器人自动工作方式的轨迹规划作了阐述。实践表明,使用该机器人代替人工作业,不仅可以减轻操作工人的劳动强度,还可提高工作效率和施工质量,具有较强的应用价值。
格式:pdf
大小:216KB
页数:4P
人气:76
4.8
双连杆柔性臂动力学建模与仿真分析 基于修正的固定界面子结构模态综合法———craig-bampton法,利用多体系统动力学仿真分析软件msc.adams与有限元分析软件msc.nastran完成对双连杆柔性机械臂动力学建模,进行了运动学仿真分析,并且与刚性臂运动相比较,对柔性机械臂末端运动振动信号进行了频谱分析。分析结果表明,这种方法在多柔体系统建模和分析中是精确和高效的。
格式:pdf
大小:314KB
页数:3P
人气:76
4.7
自卸汽车系统动力学建模与分析 针对重型自卸汽车的开发,应用多体动力学分析软件adams建立了自卸汽车数字化模型,进行了随机路面下的平顺性仿真试验,综合评价了自卸汽车驾驶员舒适性能。
格式:pdf
大小:5.4MB
页数:66P
人气:76
4.6
中国科学技术大学 硕士学位论文 基于假想柔顺控制的膝关节助力机器人动力学分析及其运动控 制 姓名:谢兴旺 申请学位级别:硕士 专业:检测技术与自动化装置 指导教师:余永研 2011-05 摘要 摘要 近年来随着全球范围内人口老年化趋势日益加剧,可穿戴型助力机器人已 经成为重点的研究领域之一,膝关节助力机器人作为可穿戴型助力机器人的重要 组成部分,科学家对其技术的开发和研究已经取得巨大的进步。膝关节助力机器 人将环境感知和多传感器信息融合和运动控制等多种功能集于一身,是典型的人 机一体化系统。当人穿上膝关节助力机器人时,机器人在人的智力指导下为人的 行走提供助力从而扩展了人的运动能力和活动范围。 在国家自然科学基金“可穿戴型智能助力机器人技术研究”的资助下,本 文采用假想柔顺控制策略和pid控制算法,实现了膝关节助力机器人为人提供助 力的目的。具体内容包括: 1.通过分析
格式:pdf
大小:207KB
页数:4P
人气:76
4.5
支承轮式管道机器人变径机构动力学分析 介绍了4种支承轮式管道机器人变径方案的工作原理,比较分析得出丝杠螺母副变径机构具有更高的驱动效率。在此基础上,基于虚功原理分析了丝杠螺母—支承杆变径机构的驱动特性,并应用多体动力学仿真软件adams对其进行了动力学仿真验证,结果显示丝杠螺母—支承杆变径机构具有更高的驱动效率和更强的管径适应能力,并给出了其驱动电动机随管径变化的一般动力学特性,为支承轮式管道机器人推广应用奠定了基础。
格式:pdf
大小:617KB
页数:3P
人气:76
4.8
一种船舱除锈喷漆移动机器人的设计 依据船舶修造行业的现状,多方面考虑适应各种不同大小船舶的使用条件,提供一种可满足各种船舱除锈喷漆工艺技术要求的除锈喷漆移动机器人的设计,通过变换机器人前端手部不同工具,实现在同一台机器人上既能够进行除锈作业,也能够进行喷漆作业,尤其是能够实现在船舱中的三维空间作业面的方便转换和简单曲面的连续除锈喷漆作业.
格式:pdf
大小:490KB
页数:3P
人气:76
4.5
六自由度喷漆机器人动力学分析 应用牛顿-欧拉方法推导了6自由度机器人的动力学方程,在matlab中进行了编程求解。并应用adams软件建立虚拟样机模型进行动力学仿真,用仿真的结果验证了编程计算的正确性。最后采用adams的参数化分析方法,搜索出了满足一定约束条件下机器人各关节的最大驱动力矩,为机器人电机精确选型提供了参考依据。
格式:pdf
大小:208KB
页数:未知
人气:76
4.6
双连杆机械臂的动力学建模 本文以双连杆机械臂为对象,针对这一类非线性的机械模型对象,利用拉格朗日法对被控对象进行运动学建模,以便于根据模型设计各种不同的控制器,不仅使双连杆机械臂系统具有良好的稳态和暂态性能,同时也保证了系统具有较好的鲁棒性。笔者通过仿真实例验证了所给结果的有效性,为机械臂的控制提供了一种新的思路。
格式:pdf
大小:998KB
页数:5P
人气:76
4.6
草方格铺设机器人多体动力学仿真与试验 采用pro/e和adams软件相结合的方法,建立了草方格铺设机器人动力学模型,同时探讨了二者联合建模仿真的一般步骤。模型添加必要的边界条件后,对纵向压轮和横向插刀正常动作时的草方格铺设机器人振动状态进行了仿真。通过仿真,得到了牵引车、纵向铺设机构、横向铺设机构、纵向压轮和横向插刀质心的位移、速度以及加速度曲线。分析了这些曲线出现波动的原因,为进一步的优化提供了数据。通过试验,得到实际状态下的试验曲线,并与仿真曲线进行对照,证实了草方格铺设机器人仿真模型和仿真结果的合理性和可靠性。
文辑创建者
我要分享 >
职位:岩土工程技术副总工
擅长专业:土建 安装 装饰 市政 园林
相关编辑
文辑推荐
知识推荐
百科推荐