新型两自由度柔性并联机械手的主动振动控制及其仿真
2025-01-22
针对一种新型两自由度柔性并联机械手,在含有压电元件的有限元模型基础上,基于模态理论和滑模变结构理论,研究其振动主动控制问题。采用有限元法和模态理论建立系统的动力学模型。根据系统的性能要求,采用最优化方法确定滑移面,基于Lyapunov直接法设计滑模控制器。控制器能对系统的前几阶模态实施控制,实现机械手的振动主动控制。仿真结果表明,该控制器可有效地抑制柔性构件产生的弹性振动,减小并联机械手动平台的位置误差,从而验证了该控制器的可行性和有效性。

 柔性并联平台的动力学建模及主动振动控制
柔性并联平台的动力学建模及主动振动控制 针对柔性并联机器人的结构振动及控制问题,提出在并联机器人的柔性构件上附加多组成对的压电换能器进行振动测量和主动振动控制的方法。首先,设计了基于直线超声电机驱动的3-prr(p代表移动副,r代表转动副)柔性并联定位平台;其次,根据hamilton方程和假设模态法,并考虑到每条支链中柔性杆终端的实际边界条件,分别建立了三条对称支链和移动平台的动力学模型,通过施加闭链约束方程,得到了3-prr柔性并联平台的刚柔耦合动力学方程;然后,为有效抑制振动,在柔性杆上安装多组成对的压电驱动器和传感器,从而使柔性杆具有智能结构的特性;最后,基于此模型,提出了采用pd反馈控制器和srf应变率反馈(strainratefeedback)控制器相结合的混合控制方法来进行轨迹跟踪与振动抑制,并给出了基于李雅普诺夫理论的稳定性证明。matlab仿真结果表明:所提出的基于多组压电换能器的混合控制方法可以使动平台在准确跟踪目标轨迹的同时,实现对柔性杆残余振动的快速抑制,进而提高定位平台的效率和精度,为后续的工程实验提供了理论支撑。
一种六自由度工业机械手设计及仿真研究 设计了一种能应用于弧焊、搬运、喷涂的六自由度工业机械手.基于ugnx构建了六自由度工业机械手机械本体,设计了一种机械手真空吸附式末端执行器;构建了机械手d-h坐标系和d-h参数,进行了机械手运动学分析;基于matlab构建了机械手仿真数学模型.结果表明,该机械手能完成既定功能,具有结构合理、性能可靠等优点.
编辑推荐下载
格式:pdf
大小:524KB
页数:33P
人气:80
 4.5
4.5
西南交通大学太湖学院 毕业设计(论文)说明书 -1- 第一章引言 机械工业是国民的装备部,是为国民经济提供装备和为人民生活提供耐用消费品 的产业。不论是传统产业,还是新兴产业,都离不开各种各样的机械装备,机械工业 所提供装备的性能、质量和成本,对国民经济各部门技术进步和经济效益有很大的和 直接的影响。机械工业的规模和技术水平是衡量国家经济实力和科学技术水平的重要 标志。因此,世界各国都把发展机械工业作为发展本国经济的战略重点之一。 工业机械手是近几十年发展起来的一种高科技自动化生产设备。工业机械手的是 工业机器人的一个重要分支。它的特点是可通过编程来完成各种预期的作业任务,在 构造和性能上兼有人和机器各自的优点,尤其体现了人的智能和适应性。机械手作业 的准确性和各种环境中完成作业的能力,在国民经济各领域有着广阔的发展前景。 机械手是在机械化,自动化生产过程中发
格式:pdf
大小:624KB
页数:34P
人气:80
4.3

机电一体化系统设计课程设计说明书 设计题目:多自由度机械手机电系统设计 学院:金山学院 专业年级:10机械 一、总体方案设计....................................................................................................4 1.1设计任务.............................................................................................................4 1.2总体方案确定.................................................................................................
热门文档 新型两自由度柔性并联机械手的主动振动控制及其仿真
格式:pdf
大小:525KB
页数:4P
人气:80
4.5
多自由度并联机构主动视觉平台机构中虎克铰的设计 根据已设计出的六自由度并联机构的主动视觉平台的虚拟样机,对其中的铰链结构虎克铰进行设计,在约束条件的分析设定中,充分考虑了虎克铰关节的摆角范围,给出了虎克铰摆角的计算公式。为系统的稳定性和运动准确性提供了保障。
格式:pdf
大小:210KB
页数:15P
人气:80
4.5
基于plc三自由度机械手的设计(新品) 摘要机械手在自动化领域的应用越来越广泛,与其他类型的机械手相比,具有结构简单、 造价较低、维护方便、速度快等特点。它能模仿人手和臂的某些动作功能,用以按固定程序 抓... 摘要 机械手在自动化领域的应用越来越广泛,与其他类型的机械手相比,具有结构简单、造价较 低、维护方便、速度快等特点。它能模仿人手和臂的某些动作功能,用以按固定程序抓取、 搬运物件或操作工具的自动操作装置。它可代替人的繁重劳动以实现生产的机械化和自动 化,能在有害环境下操作,以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工 和原子能等部门。论文就是通过应用西门子s7-200系列通过编程来控制气动机械手运行的。 对机械手的发展及应用做了简要介绍,并详细介绍了系统的结构、工作原理、步进电机控制 和软件实现。<br/
格式:pdf
大小:3.1MB
页数:47P
人气:80
4.8
重庆科技学院 高等教育自学考试本科毕业论文 题目 考生姓名:准考证号: 专业层次:院(系): 指导教师:职称: 重庆科技学院 二o14年8月30日 三号黑体,居中 重庆科技学院 高等教育自学考试本科毕业论文 中文题名 考生姓名: 准考证号: 专业层次: 指导教师: 院(系): 重庆科技学院 二oo七年月日 前言 可编程控制器是20世纪70年代以来,在集成电路,计算机技术基础上发展起 来的一种新型工业控制设备。由于具有功能强、可靠性高、配置灵活、使用方便以 及体积小、重量轻等优点,国外已广泛应用于自动化控制的各个领域,并已成为现 实工业生产自动化的支柱产品。近年来,国内在plc技术与产品开发应用方面发 展很快,除有许多从国外引进的设备,自动化生产线外,国内的机床设备已越来越 多采用plc控制系统采用控制系统取代传统的继电—接触器控制系统小;
格式:pdf
大小:594KB
页数:41P
人气:80
4.5

目录 1前言................................................................................................................................1 1.1设计题目的背景及目的........................................................................................1 1.2概述........................................................................................................................1 1.3.机械手发展简史...........
格式:pdf
大小:1.4MB
页数:3P
人气:80
4.7

**资讯 http://www.cqvip.com **资讯 http://www.cqvip.com **资讯 http://www.cqvip.com
精华文档 新型两自由度柔性并联机械手的主动振动控制及其仿真
格式:pdf
大小:37KB
页数:4P
人气:80
4.6

毕业设计(论文)任务书 第1页 毕业设计(论文)题目: 四自由度取放料机械手设计 毕业设计(论文)要求及原始数据(资料): 机械手是工业自动化的产物,取放料机械手的工作是将物料从某一位置取上放置到另 一位置。该机械手能够模仿人类手臂结构进行物料的取放,是一种典型的关节型机械手。 具有四个自由度。 机器人的主要参数如下: 1、自由度:4 2、最大抓取重量:2.5kg(包括手抓重量) 3、操作空间: 腰部旋转角度:3000(最大旋转速度:1200/sec) 肩部旋转角度:130 0 (最大旋转速度:720/sec) 肘部旋转角度:1100(最大旋转速度:1090/sec) 手腕旋转角度:±1800(最大旋转速度:1630/sec) 4、手臂长度: 大臂:250mm 小臂:180mm 5、机械手的具体机械结构可以充分发挥个人想象力设计,但必须实现其应有
格式:pdf
大小:725KB
页数:27P
人气:80
4.7
1 目录 摘要:本设计的机械手是基于提高劳动生产率、产品质量和经济效益,减轻工人劳动强度 而设计的。在某些劳动条件极其恶劣的条件下,工人难以用手工工作,可用本机械手代替人力劳动。 本设计为四自由度圆柱坐标型工业机械手,其工作方向为两个直线方向和两个旋转方向。 本设计中的四自由度棒料搬运机械手,主要是针对质量少于2kg的圆形棒料的搬运。通过气爪 手指的不同选择可满足直径小于60mm的棒料的搬运。在控制器的作用下,机械手执行将工件从一 条流水线拿到另一条流水线并把工件翻转过来这一简单的动作. 关键词:四自由度;机械手;搬运;工业机器人 thefourdegrees-of-freedombarmanipulatordesigns abstract:thispaperdesignforenhancesthelaborproductivity,p
格式:pdf
大小:3.0MB
页数:4P
人气:80
4.6
注塑机械手振动控制研究 注塑机械手是对塑料加工生产进行自动控制,使其按照预定要求输送制品或操持工具进行生产操作的自动化生产设备。在实际工作过程中,注塑机械手在低频率下会产生剧烈的振动,影响机械手的工作精确度。本文应用有限元重点对机械手进行模态分析、谐响应分析,并针对实际工况分析瞬态动力学特性。在此基础上对机械手提出改进设计方案,根据有限元计算结果进行对比分析,优化了机械手结构模型。
格式:pdf
大小:824KB
页数:4P
人气:80
4.4
三自由度螺栓拆卸机械手的设计及动力学分析 设计一种在核环境下工作的螺栓拆卸机械手,该机械手末端执行器上装载了液压驱动的拆卸螺栓的扳手头,机械手可驱动扳手头在空间实现三自由度运动。建立、求解其动力学方程,并分析其动力学性能;通过laplace变换建立机械手的传递函数模型,设计相应的补偿重力影响的pd控制系统。建立该螺栓拆卸机械手的联合仿真模型,进行动力学仿真。仿真结果为机构系统优化设计和样机制造提供参考。
格式:pdf
大小:513KB
页数:未知
人气:80
4.3
基于3UPU-3PUU型组合并联机构的主动振动抑制控制 并联机构的组成与串联机构不同,其支链运动副的顺序会发生改变,机构运动输出型式也会完全不同。利用部分支链重合及驱动运动副的锁死和放开,设计用于遥控操作精密手术及微创手术等医疗用途的新型组合并联机构,实现三微动和三平动运动输出以及机构操作过程的误差补偿和主动振动抑制控制。
最新文档 新型两自由度柔性并联机械手的主动振动控制及其仿真
格式:pdf
大小:1.4MB
页数:6P
人气:80
4.6
?1995-2004tsinghuatongfangopticaldiscco.,ltd.allrightsreserved. ?1995-2004tsinghuatongfangopticaldiscco.,ltd.allrightsreserved. ?1995-2004tsinghuatongfangopticaldiscco.,ltd.allrightsreserved. ?1995-2004tsinghuatongfangopticaldiscco.,ltd.allrightsreserved. ?1995-2004tsinghuatongfangopticaldiscco.,ltd.allrightsreserved. ?1995-2004tsinghua
格式:pdf
大小:1.1MB
页数:4P
人气:80
4.7
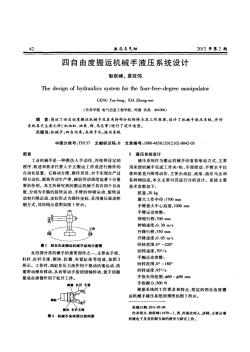
四自由度搬运机械手液压系统设计 作者:耿跃峰,夏政伟,gengyue-feng,xiazheng-wei 作者单位:许昌学院电气信息工程学院,河南许昌,461000 刊名:液压与气动 英文刊名:chinesehydraulics&pneumatics 年,卷(期):2012(2) 本文链接:http://d.g.wanfangdata.com.cn/periodical_yyyqd201202015.aspx
格式:pdf
大小:213KB
页数:3P
人气:80
4.8
单连杆柔性机械臂的滑模振动控制 基于lagrange方程和假设模态法,推导出单连杆柔性机械臂的动力学模型,应用微分几何输出重定义的方法,将电动机转角和振动模态变量的线性组合作为柔性机械臂系统的控制输出量,使柔性机械臂系统在平衡点附近转变为易于控制的最小相位系统。设计了一种滑模控制器,实现了柔性机械臂的振动抑制,仿真试验结果表明了该方法的有效性。
格式:pdf
大小:385KB
页数:4P
人气:80
4.4
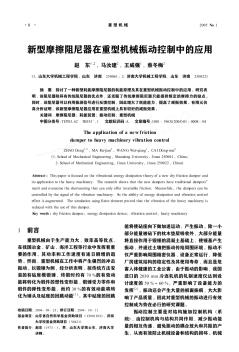
探讨了一种新型耗能摩擦阻尼器的耗能原理及其在重型机械振动控制中的应用。研究表明,该阻尼器除具有传统阻尼器的优点外,还克服了传统摩擦阻尼器只能提供恒定的摩擦力的缺点。同时,该阻尼器可以利用振源信号进行反馈控制,因此增大了耗能能力,提高了减振效果。有限元仿真分析证明,该新型摩擦阻尼器应用在重型机械上具有较好的减振效果。
格式:pdf
大小:830KB
页数:56P
人气:80
4.6
i 摘要 本次设计的多功能机械手为液压通用机械手,主要由手爪、手腕、 手臂、机身、机座等组成,具备上料、翻转和转位等多种功能,并 按自动线的统一生产节拍和生产纲领完成以上动作。本机械手机身 采用机座式,自动线围绕机座布置,其坐标形式为圆柱坐标式,具 有立柱旋转、手臂伸缩、腕部转动和腕部摆动等4个自由度;驱动 方式为液压驱动,利用油缸、齿轮、齿条实现直线运动;利用油缸 与齿轮、齿条或链条实现回转运动。液压驱动的优点是压力高、体 积小,出力大,动作平缓,并能在中间位置停止。本次设计的机械 手能对不同物体完成多种动作。 关键词:机械手;圆柱坐标;液压驱动 ii abstract thedesignofmulti-manipulatorhydraulicmanipulatorgeneral,mainlyby thegripper,wrist,
格式:pdf
大小:1.1MB
页数:5P
人气:80
4.5
六自由度钢带并联机器人运动控制系统的研制 运动控制系统对于钢带并联机器人至关重要。提出了钢带并联机器人运动控制系统的设计思路,介绍了该控制系统的工作原理与功能,阐述了spiipluspci-lt-6运动控制卡的性能指标、硬件结构、用户程序结构等。针对钢带并联机器人位置逆解的运动控制问题,给出逆解的acspl求解框图和编程代码,分析了钢带并联机器人运动控制中的关键技术问题,并指出相应的解决方案。研究结果表明,该运动控制系统可满足钢带并联机器人精确快速运动的要求。
格式:pdf
大小:199KB
页数:未知
人气:80
4.8
电梯机械振动的频域最优主动控制 电梯运行的舒适程度主要靠其机械振动控制,本文对控制率的设计主要通过h2频域的最优控制实现,h2范数从外扰的闭环系统到受控系统输出最小的传递函数阵。电梯轿厢的加速振动是闭环系统的反映信号,有利于工程中比较容易实现主动控制。我们通过仿真数值可以看出,频域的最优控制取得了较好的效果,极大的限制了闭环传递函数。
格式:pdf
大小:1.8MB
页数:4P
人气:80
4.3
为了改善在建筑结构中采用调频质量阻尼器(简称tmd)进行抗震时抗震效果不稳定和抑制频带窄等缺点,研究了变阻尼半主动调频质量阻尼器(简称stmd)。为了使阻尼变化容易实现,在设计激励力时采用了阶跃函数方式;同时还考虑到变动阻尼应在一定范围内进行的特点,提出了含约束的结构振动半主动控制方案;在控制策略方面,考虑到地震的随机性,引入了广义预测控制方法。从实例分析可知,采用stmd可以使设计质量、刚度和阻尼值分别下降约30%,90%,90%。计算仿真结果表明,采用stmd的抗震效果比tmd要好得多。
文辑创建者
我要分享 >
职位:给排水工程
擅长专业:土建 安装 装饰 市政 园林
相关编辑
文辑推荐
知识推荐
百科推荐