支承轮式管道机器人变径机构动力学分析
2025-04-03
介绍了4种支承轮式管道机器人变径方案的工作原理,比较分析得出丝杠螺母副变径机构具有更高的驱动效率。在此基础上,基于虚功原理分析了丝杠螺母—支承杆变径机构的驱动特性,并应用多体动力学仿真软件ADAMS对其进行了动力学仿真验证,结果显示丝杠螺母—支承杆变径机构具有更高的驱动效率和更强的管径适应能力,并给出了其驱动电动机随管径变化的一般动力学特性,为支承轮式管道机器人推广应用奠定了基础。

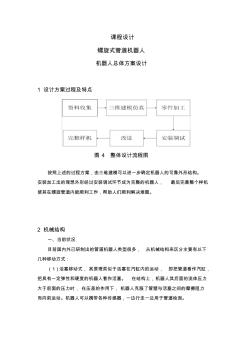
课程设计 螺旋式管道机器人 机器人总体方案设计 1设计方案过程及特点 按照上述的过程方案,由三维建模可以进一步确定机器人的可靠外形结构。 安装加工出的理想外形经过安装调试环节成为完整的机器人,最后完善整个样机 使其在螺旋管道内能顺利工作,帮助人们顺利解决难题。 2机械结构 一、当前状况 目前国内外已研制出的管道机器人类型很多,从机械结构来区分主要有以下 几种移动方式: (1)活塞移动式,其原理类似于活塞在汽缸内的运动,即把管道看作汽缸, 把具有一定弹性和硬度的机器人看作活塞。在结构上,机器人其后面的流体压力 大于前面的压力时,在压差的作用下,机器人克服了管壁与活塞之间的摩擦阻力 而向前运动。机器人可以携带各种传感器,一边行走一边用于管道检测。 图4整体设计流程图 (2)滚轮移动式,利用滚轮驱动式的行走结构,以电机作原动机,为了增 加牵引力,一般采用多轮驱动式,由于
 基于遗传算法的轮式管道机器人的参数优化
基于遗传算法的轮式管道机器人的参数优化 研究了一种轮式全驱动管道机器人质量的优化问题,提出一种基于遗传算法的质量选择的优化模型,分析了轮式管道机器人在满足拖动能力、行进速度等性能指标的要求下,通过轮径、轮距、转矩、转速等参数的改变,能够使机器人的质量得到一个较小、较优的数值,实现机器人的整机轻巧,使用方便,降低制造成本。采用遗传算法,通过c++编制仿真程序,仿真结果证明了该算法是有效的、稳定的。通过机械系统动力学仿真分析软件adams进行拖动力仿真试验,证明了该优化方法的正确性。
编辑推荐下载
格式:pdf
大小:5.4MB
页数:66P
人气:88
 4.6
4.6
中国科学技术大学 硕士学位论文 基于假想柔顺控制的膝关节助力机器人动力学分析及其运动控 制 姓名:谢兴旺 申请学位级别:硕士 专业:检测技术与自动化装置 指导教师:余永研 2011-05 摘要 摘要 近年来随着全球范围内人口老年化趋势日益加剧,可穿戴型助力机器人已 经成为重点的研究领域之一,膝关节助力机器人作为可穿戴型助力机器人的重要 组成部分,科学家对其技术的开发和研究已经取得巨大的进步。膝关节助力机器 人将环境感知和多传感器信息融合和运动控制等多种功能集于一身,是典型的人 机一体化系统。当人穿上膝关节助力机器人时,机器人在人的智力指导下为人的 行走提供助力从而扩展了人的运动能力和活动范围。 在国家自然科学基金“可穿戴型智能助力机器人技术研究”的资助下,本 文采用假想柔顺控制策略和pid控制算法,实现了膝关节助力机器人为人提供助 力的目的。具体内容包括: 1.通过分析
格式:pdf
大小:490KB
页数:3P
人气:88
4.5
六自由度喷漆机器人动力学分析 应用牛顿-欧拉方法推导了6自由度机器人的动力学方程,在matlab中进行了编程求解。并应用adams软件建立虚拟样机模型进行动力学仿真,用仿真的结果验证了编程计算的正确性。最后采用adams的参数化分析方法,搜索出了满足一定约束条件下机器人各关节的最大驱动力矩,为机器人电机精确选型提供了参考依据。
热门文档 支承轮式管道机器人变径机构动力学分析
格式:pdf
大小:422KB
页数:4P
人气:88
4.4
第41卷2013年第4期 本 栏 目 编 辑 陆 秋 云 通 用 124 可变径管道机器人系统的 设计与研究 武 燕1,王才东2,王新杰2,牛志军2 1 河南机电职业学院机械工程系 河南郑州 451191 2 郑州轻工业学院机电工程学院 河南郑州 450002 摘要:笔者在分析管道机器人国内外发展现状基础上,针对管道机器人对不同管径需求,提出了一种 双履带式可变径管道机器人的总体方案。设计了机器人的驱动装置、直径调节机构等关键部件,并设 计了机器人的控制系统,该控制系统上采用了上、下位机控制结构,通过手动和自动2种控制模式, 实现机器人无级调速、前进、后退、转弯和图像信息采集等功能。研究结果为可变径管道机器人的实 用化开发奠定了基础。 关键词:管道机器人;变管径;穿缆;控制系统 中图分类号:tp242 文献标志码:a 文章编号:1001-3954
格式:pdf
大小:218KB
页数:3P
人气:88
4.8
管道机器人移动牵引机构设计 管道机器人是特种机器人研究领域中的热点.该文设计了管道机器人蠕动式移动牵引机构,采用电机驱动丝杠正反转,丝杠上丝杠螺母前移,前后两组支撑腿臂交替支撑住管壁,从而实现了机器人的蠕动式前行的驱动方案,并设计了该系统的电控部分.模拟管道中的实验验证了该方案的可行性.
格式:pdf
大小:484KB
页数:3P
人气:88
4.6
管道机器人弯管通过性的分析 讨论了管道机器人的数学模型,并且对垂直弯管和分支管道的通过性做了分析。通过建立机器人的几何方程,使得机器人可能通过各种弯管。其结果可对机器人的动静态特性研究提供一定的参考。

格式:pdf
大小:642KB
页数:4P
人气:88
4.4
基于火炮身管测量的管道机器人 针对带膛线身管这一特殊的测量对象,研制了一种能自动测量火炮膛线的新型管道机器人.分析了该机器人的机构组成及工作原理,研究了其运动学和力学特性.实验证明,该机器人测量精度达到0.002mm,多次测量的重复性误差小于0.002mm,并且可靠性高.
精华文档 支承轮式管道机器人变径机构动力学分析
格式:pdf
大小:874KB
页数:4P
人气:88
4.5
一种单向伸缩式管道机器人系统的建模与仿真 介绍了基于单向运动机构的伸缩式管道机器人工作原理,对管道机器人整机系统进行合理简化,得到等效系统模型。根据等效模型,分析直流伺服电机、滚珠丝杠,以及单向运动机构的动力学行为。为了研究系统的输入电压信号和输出的运动速度之间的关系,建立了机器人系统的完整框图模型。利用matlab对机器人系统进行仿真,分析不同输入信号下系统的响应特性,为管道机器人的机构设计和控制器设计提供理论依据。
格式:pdf
大小:689KB
页数:6P
人气:88
4.5
挖掘机载机整机挖掘力刚体动力学分析 以轮式wz30-25型液压挖掘装载机为实例,基于多刚体系统动力学理论,在三组反铲机构液压缸的运动作用下,研究了挖掘装载机整机系统在铲斗斗齿切向产生的挖掘力响应。在斗杆液压缸挖掘和铲斗液压缸挖掘两种工况下,进行了挖掘力响应分析。在各工况下,影响挖掘力的重要参数有很多,包括液压系统的压力、液压缸的尺寸、各液压缸间的相互作用力、整机稳定性和地面附着性能。将推导这些因素和最大挖掘力之间的函数关系。
格式:pdf
大小:3.6MB
页数:5P
人气:88
4.6
排水管道机器人综述 排水管道机器人通常采用模块化设计,一般分为爬行器、电缆绞盘、上位控制单元、检测单元、辅助装置、图像处理软件等模块。本文介绍排水管道机器人各模块现有技术特点,并结合智能控制技术,展望未来排水机器人发展方向。
格式:pdf
大小:886KB
页数:6P
人气:88
4.7
基于凸轮自锁原理的伸缩式管道机器人设计 为提高伸缩式管道机器人的负载能力,研制一种基于凸轮自锁原理的伸缩式管道机器人,牵引力不受限于某一固定摩擦力,可随外载荷的增大而增大。应用分析力学原理导出单向锁止机构各参数应满足的关系式,并给出可适应管径变化的凸轮轮廓设计方法,计算出移动机构系统的响应时间,提出一套系统的管道机器人设计理论方法。利用提出的设计方法研制试验样机,并在管道中成功进行一系列试验。研究成果提升了伸缩式管道机器人的负载能力与管道适应性,完善了基于自锁原理伸缩式管道机器人的设计理论。
格式:pdf
大小:354KB
页数:4P
人气:88
4.4
某火箭弹引信擦地炸机构微弹簧的动力学分析 对无后坐炮发射时火箭弹中引信擦地炸机构微小弹簧的运动进行了动力学分析。在考虑弹簧质量的情况下建立了弹簧和导电杆之间的物理模型。该模型的微分方程计算结果表明微小弹簧在弹道上的振动过程会使导电杆的受压产生周期性变化,尤其是在一些波谷处,导电杆几乎不受压力,此时如果有火箭加速和其它装配缺陷等因素的影响,就会引起弹丸在弹道上的早炸。
最新文档 支承轮式管道机器人变径机构动力学分析
格式:pdf
大小:818KB
页数:4P
人气:88
4.7
牛头刨床六杆机构的多体动力学分析及优化设计 简要介绍多体系统动力学的原理及多体系统动力学计算的积分方法,利用动力学仿真软件adams,对牛头刨床的六杆机构进行分析,并通过虚拟样机技术,对牛头刨床加速度和压力角进行了优化设计.为实际的机构设计提供依据,也为虚拟样机技术的学习提供了实例.
格式:pdf
大小:1.4MB
页数:7P
人气:88
4.4
某型燃气轮机低压涡轮压气机转子动力学分析 为了获得某型燃气轮机低压涡轮压气机转子的动力学特性,并验证其稳定性及可靠性,本文使用samcef/field软件的转子动力学分析模块对该转子进行了分析计算。根据机组实际运行的条件,计算了该机组转子的临界转速、稳态不平衡响应、叶片丢失瞬态响应等。计算结果表明,临界转速安全系数合理;转子系统选取的平衡量具有较小的振动幅值;转子的瞬态响应结果验证了结构方案的合理性,转子系统具有较好的稳定性。得出了此转子结构方案能保证低压涡轮压气机稳定运行的结论。
格式:pdf
大小:563KB
页数:4P
人气:88
4.6
面向矩形管道的管道机器人自适应调节机构的研究 根据管道机器人管内适应性的要求,提出一种面向矩形管道的新型自适应调节机构的设计方案。分析该机构的工作原理、力学特性,建立其数学模型并进行仿真分析。仿真结果表明:该机构提高了管内机器人对矩形管道的适应性,并改善了牵引能力,为机构参数的合理选取提供了科学依据。

格式:pdf
大小:468KB
页数:5P
人气:88
4.7
履带起重机起臂过程动力学分析 基于有限元分析技术,建立臂架的有限元模型,在ansys软件中对履带起重机的起臂过程进行动力学分析.用link180单元模拟变幅拉板,利用其在温度载荷下的变形特性,通过设置相关的线性热膨胀系数和温度载荷,使单元长度匀速缩短,带动臂头,完成起臂控制.以位移约束的方法代替常规载荷约束的方法,解决了起臂过程模拟中,由于拉板力大小和方向随时间不断变化,无法定义载荷步的问题.ansys软件结构动力学分析模块中含有瞬态分析模块,可对履带起重机起臂的动态过程进行模拟和有限元分析,为实际的履带起重机起臂调试过程提供参考.
格式:pdf
大小:92KB
页数:未知
人气:88
4.3
微型管道机器人 苏州大学的5名大学生合作发明了一种微型管道机器人。其能够深入到核电厂蒸汽发生器的管道内,检查管道的安全状况,以避免核泄露等安全事故的发生。
格式:pdf
大小:477KB
页数:未知
人气:88
4.5
空间飞网质量块动力学分析及收口机构优化设计 研究空间飞网收口机构在捕获过程中产生翻滚缠绕的原因及质量块优化设计的方法。通过在质量块连体坐标中对其所受空间力系进行简化,分析质量块产生翻滚的原因,并据此对质量块与捕获网的连接进行优化设计。建立了超声波电机启动后质量块各转动部分的动力学方程,分析了其对产生缠绕的影响。并据此对原质量块的结构进行改进和优化设计。实验证明经优化设计的新结构改善了收口机构翻滚缠绕问题。
格式:pdf
大小:203KB
页数:3P
人气:88
3
棱柱杆侵彻岩土的动力学分析——首先建立了计算撞击力的刚体一流体撞击模型和计算靶体变形的法向膨胀理论。在此基础上,根据动量定理和功能守恒定律,建立了棱柱杆侵彻岩土时的动力学模型。采用龙格一库塔方法对这些非线性动力学方程进行数值求解。由这些非线性...
格式:pdf
大小:620KB
页数:3P
人气:88
4.5
集装箱船结构动力学分析 以某3100teu巴拿马型集装箱船为例,建立集装箱船体全船结构三维有限元动力学分析的计算模型,对船体结构进行实特征值、有阻尼瞬态响应的计算分析;采用lanczos方法计算特征值;采用模态方法进行瞬态响应分析。分析结果表明,该船在运营过程中容易出现扭转振动,需要对驾驶甲板的侧翼结构进行修改设计,但其振动强度在总体上是可以接受的。
格式:pdf
大小:396KB
页数:4P
人气:88
4.7
单杆柔性机械臂动力学分析 本文利用d’alembert原理建立了单杆柔性机械的动力学方程,并用模态展开法对其进行了离散化。最后,给出了计算机模拟结果。为进一步开展多杆柔性机械臂动力学分析其控制打下了基础。
文辑创建者
我要分享 >
职位:夹具造价工程师
擅长专业:土建 安装 装饰 市政 园林
相关编辑
文辑推荐
知识推荐
百科推荐