中立型非线性不确定时滞系统的控制器设计
2025-01-20
研究了一类中立型非线性不确定时滞系统的稳定性分忻和状态观测器设计问题,系统包含状态时滞和非线性不确定性,基于Lyapunov稳定性理论,给出了该类时滞系统在非线性不确定性满足增益有界的条件下状态观测器存在的充分条件,并通过线性矩阵不等式(LMI)方法构造得出基于状态观测器的动态输出反馈控制器,最后给出一个数值算例验证了本文结果的有效性。

 一类非线性不确定时滞系统鲁棒控制器的设计
一类非线性不确定时滞系统鲁棒控制器的设计 利用lmi方法,针对不确定时滞系统的鲁棒模糊控制器设计及稳定性,提出了基于t-s的模糊模型,得到了使系统渐近稳定且具有h∞-扰动抑制度的模糊状态反馈控制器存在的充分条件,此充分条件以线性矩阵不等式的形式给出,因而具有数值易解性.
不确定时滞系统的控制器设计 为了消除时滞和不确定性给实际系统造成的不良影响,采用鲁棒控制系统设计技术,进行鲁棒控制,对具有不确定性的系统,设计1个反馈增益控制器,使系统在不确定性的容许变化范围内满足设计要求,降低系统的灵敏度.通过构造一种新的lyapunov泛函方法,研究了一类带有时变时滞的不确定系统的鲁棒控制问题.通过细化不确定信息的结构,给出了基于线性矩阵不等式的控制器设计方法.
编辑推荐下载
格式:pdf
大小:733KB
页数:5P
人气:92
 4.3
4.3
基于不确定时滞模型的鲁棒AQM控制器设计 针对网络环境的不确定性和网络参数的时变性,采用不确定时滞系统模型对网络拥塞控制问题进行了研究。给出了利用线性矩阵不等式方法判定主动队列管理(activequeuemanagement,aqm)系统稳定的充分条件,以及基于求解非线性矩阵不等式的aqm控制器参数设计方法,设计了基于线性矩阵不等式的含时滞静态输出反馈控制器。仿真结果表明,利用该方法所得到的控制器是有效的,在变化的网络环境下,其动态响应更快,稳态波动更小。
格式:pdf
大小:187KB
页数:3P
人气:92
4.4
不确定时滞系统的鲁棒H_∞控制器设计 针对一类含有不确定参数的线性时滞系统的控制问题,利用lmi方法研究了反馈控制器的分析与设计,设计的控制器对于所允许的参数不确定性和时滞,能保证闭环系统渐近稳定且闭环系统具有理想的性能指标,通过数值例子说明了所设计控制器的有效性和可行性。
热门文档 中立型非线性不确定时滞系统的控制器设计
格式:pdf
大小:784KB
页数:6P
人气:92
4.6
不确定时滞系统鲁棒H_∞控制器的设计 基于lyapunov稳定性理论,采用线性矩阵不等式(lmi)处理方法,针对不确定线性时滞系统,分析了系统同时具有鲁棒稳定性能和h∞性能的充分条件,在此基础上,设计了不确定线性时滞系统的鲁棒无记忆的h∞控制器和鲁棒有记忆的h∞控制器,并给出了相应的证明,最后通过仿真实例验证了设计方法的有效性.
格式:pdf
大小:182KB
页数:7P
人气:92
4.5
不确定变时滞奇异摄动系统的控制器设计 采用鲁棒控制器的设计技术及鲁棒二次可镇定控制器的设计思想,对闭环系统进行鲁棒控制,以消除时滞因素和不确定性对实际系统的不良影响.通过构造一种新的lyapunov泛函,给出基于线性矩阵不等式形式的时滞依赖和时滞独立的控制器设计方法.结果表明,设计的状态反馈控制器,能使闭环系统在不确定性的容许变化范围内达到性能要求,降低了系统的灵敏度.数值算例表明,所得结果更具有普遍性,可应用于带有不确定项的时变时滞非标准型系统.
格式:pdf
大小:186KB
页数:2P
人气:92
4.7
不确定切换时滞正系统基于观测器的控制器设计 研究一类带有区间不确定性和时变时滞的切换正系统的基于观测器的控制器设计阅题。对于一类不确定切换时滞正系统,利用梅茨勒矩阵和非负矩阵理论,设计了基于观测器的控制器来保证增广系统的正性限制。同时,通过构造多李雅普诺夫函数,得到了平均驻留时间切换信号下增广系统的指数稳定性结果。
格式:pdf
大小:343KB
页数:4P
人气:92
4.6
一类非线性时滞系统的实时模糊控制器设计 分析了现有takagisugeno型模糊控制器设计方法计算复杂且难以求解的原因。在此基础上,提出了一种与系统实时输入相关的动态模型简化算法。同时,针对一类采用该动态简化takagisugeno模型描述的非线性时滞系统,利用lyapunov稳定性分析理论和线性矩阵不等式等工具推导了闭环系统的可镇定条件,进而设计了相应的takagisugeno型模糊状态反馈控制器。实验结果表明这种模型简化方法可以减少求解的约束条件,增加了找到解的可能性。
格式:pdf
大小:416KB
页数:10P
人气:92
4.5
一类带有不确定性的时滞系统的控制器设计 针对一类带有不确定性的单输入单输出的时滞非线性系统,提出了一种鲁棒非线性控制算法.利用反步设计的迭代设计思想,在每一步构造李亚普诺夫-克拉索夫斯基函数,用放大不等式的方法获得控制器,保证闭环系统的稳定性.以连续搅拌化学反应器为例的仿真结果也验证了控制器具有良好的控制特性.
精华文档 中立型非线性不确定时滞系统的控制器设计
格式:pdf
大小:216KB
页数:未知
人气:92
4.7
不确定时滞Lur’e控制系统的鲁棒H_∞观测器设计 研究一类具有不确定时滞性lur’e控制系统的状态观测器设计和基于状态观测器的鲁棒控制器设计问题.在系统状态不能直接被测量的情况下,通过构造增广系统,利用lyapunov稳定性理论,得到了关于lur’e控制系统存在状态观测器和基于状态观测器的鲁棒控制器的充分条件,并利用matlab的lmi工具箱求解状态观测器和控制器参数.最后,通过仿真实例验证了该设计方法的有效性和可行性.
格式:pdf
大小:424KB
页数:5P
人气:92
4.4
具有非线性执行器饱和的时滞切换系统的控制器设计 主要研究了一类时滞切换系统有关非线性执行器饱和的控制器设计问题。对于具有执行器饱和的时滞切换系统,设计了状态反馈控制器,构造了共同的lyapunov函数,并利用完备性定义给出了切换系统渐近稳定的充分条件,最后用schur引理将定理的充分条件等价地转化为线性矩阵不等式的形式。
格式:pdf
大小:498KB
页数:3P
人气:92
4.6
一类不确定离散线性系统有限时间控制器设计 本文主要研究了一类同时具有时变参数不确定性和外部干扰输入的离散线性系统有限时间状态稳定性问题,用线性矩阵不等式给出问题可解的充分条件.
格式:pdf
大小:189KB
页数:5P
人气:92
4.6
时变线性系统同时强镇定控制器设计 在套代数框架下,应用素分解的方法,设计能同时强镇定两个时变线性系统的稳定控制器,并给出了所有控制器的参数化.应用该控制器参数化,对某类同时鲁棒强镇定问题进行研究,给出了两个时变线性系统可被同时强鲁棒镇定的充分条件.针对所得的控制器设计结果给出了数值例子,数值结果表明了该设计是有效和可行的.
格式:pdf
大小:257KB
页数:未知
人气:92
4.8
具有不确定时延的离散控制系统观测器设计 针对状态和输入同时存在不确定时延的一类线性离散系统网络,使用线性矩阵不等式方法研究基于观测器的状态反馈控制,利用lyapunov函数将不确定离散系统的鲁棒稳定性问题进行转化,从而应用线性矩阵不等式进行求解,最终得出该系统渐近稳定反馈控制器的一个设计方法。通过对离散控制系统进行仿真分析,验证了该方法的有效性。
最新文档 中立型非线性不确定时滞系统的控制器设计
格式:pdf
大小:393KB
页数:未知
人气:92
4.4
基于反馈线性化的PMSM非线性控制器设计 针对永磁同步电机(pmsm)绕组相电流与转速存在强耦合的特性,基于pmsm精确的数学模型,采用反馈线性化的方法设计了一非线性控制器。该设计方法不但实现了电机系统的完全解耦,而且有效抑制了参数摄动、负载扰动等不确定因素对系统性能的影响。仿真结果表明,采用反馈线性化方法设计的pmsm控制系统具有很好的速度跟踪效果,可以获得良好的稳态精度与动态性能。
格式:pdf
大小:601KB
页数:4P
人气:92
4.6
不确定奇异系统的有限时间容错控制器设计 讨论了不确定线性奇异系统的有限时间容错控制问题.针对一类具有时变外部扰动的不确定奇异系统,运用线性矩阵不等式方法(lmi),设计了鲁棒容错状态反馈控制律,使得当奇异系统执行器发生故障时,故障闭环系统仍然是无脉冲的,且保持有限时间状态稳定,同时也给出了有限时间容错控制器存在的充分条件和设计方法,数值算例验证了该容错控制设计方法的有效性.
格式:pdf
大小:716KB
页数:5P
人气:92
4.4
具有参数摄动的线性时滞系统鲁棒完整性控制器设计 引入模糊控制的思想来描述故障的程度,研究了时滞不确定性系统在同时具有执行器故障和传感器故障情况下完整性控制器存在的充分条件,并以此来设计控制器,最后以具体例子验证了所设计控制器的控制效果.
格式:pdf
大小:423KB
页数:未知
人气:92
4.6
不稳定时滞过程的分数阶PI~λD~μ控制器设计 针对不稳定时滞过程,研究了一种基于设定值加权的分数阶piλdμ控制器设计方法。首先采用比例环节构成内环反馈镇定不稳定时滞过程,然后基于等效的过程模型,依据设定值加权方法设计分数阶piλdμ控制器,并进行了控制器参数整定。仿真结果表明:用此方法设计得到的分数阶piλdμ控制器可以使系统获得良好的动态响应特性,干扰抑制特性以及克服系统参数变化的鲁棒性。
格式:pdf
大小:389KB
页数:5P
人气:92
4.5
基于谱分解的中立型延时系统控制器设计 针对线性中立型延时系统,提出一种基于算子半群谱分解理论的控制器设计方法.在中立型项的范数小于1的情况下,利用谱理论并结合投影算子,将系统无穷维解空间分解为有限维不稳定广义特征子空间和无限维稳定子空间的直和.通过对有限维子系统的研究,得到系统状态反馈控制律,并通过投影算子证明了状态反馈控制闭环系统的渐近稳定性.最后数值例子验证了所提方法的有效性.
格式:pdf
大小:328KB
页数:4P
人气:92
4.7
不稳定时滞过程PID控制器时域直接设计法 直接在时域上设计不稳定时滞过程比例积分微分(pid)控制器。采取双回路三环节的控制结构,满足时域指标-阻尼系数的要求,并对积分增益进行优化。首先设计出满足时域指标要求的理想pid控制器,然后将微分运算等效移动到内部反馈支路,最后合并3个环节得到设定值加权pid控制器。仿真表明该方法是有效的,所整定的控制系统具有好的鲁棒稳定性。
格式:pdf
大小:946KB
页数:6P
人气:92
4.7
带有死区修正的非线性系统L_2控制器设计 针对具有未知参数的受扰非线性系统,提出了一种带有死区修正的自适应鲁棒l2设计方法。根据参数的先验信息,通过将光滑投影算法、死区修正技术与参数自适应律结合起来,既抑制了参数的漂移、减小了计算负担,又使估计参数达到了最小。当外界干扰为零时,算法能够保证跟踪误差渐近收敛于任意设定的死区。当外界干扰不等于零时,系统满足l2干扰抑制性能指标。仿真结果进一步说明了算法的有效性。
格式:pdf
大小:170KB
页数:3P
人气:92
4.5
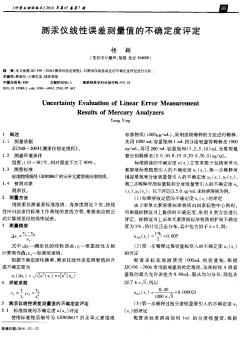
本文依据jjg548-2004《测汞仪检定规程》,对测汞仪线性误差的不确定度评定进行分析。
格式:pdf
大小:197KB
页数:6P
人气:92
4.7
具有网络诱导时延的非线性奇异网络系统脉冲控制器设计 针对一类非线性奇异时滞网络系统,给出了时滞脉冲控制器的设计方法.首先建立了不确定非线性奇异时滞网络脉冲控制系统的数学模型,然后应用李亚普诺夫定理,给出了在网络时滞脉冲控制器作用下,闭环非线性时滞奇异网络系统在容许的不确定参数条件下达到指数稳定的充分条件.该条件是一组线性矩阵不等式和代数不等式的组合,通过求解该不等式组可以得到时滞脉冲控制器的增益.并以推论的形式给出了相应的确定性非线性时滞奇异网络系统指数稳定的充分条件.最后,给出的数值仿真算例说明设计的网络时滞脉冲控制器能够镇定非线性时滞奇异网络系统.
格式:pdf
大小:279KB
页数:未知
人气:92
4.4
一类时滞系统的稳定性分析及控制器设计 研究一类具有状态时滞和输入时滞的时变时滞线性系统.首先,通过选取合适的lyapunov-krasovskii泛函,应用lmi方法和lyapunov-krasovskill稳定性定理对时滞相关的系统进行稳定性分析,并设计了相应的控制器.改进了时变时滞线性系统方面的一些结果.最后用实例验证所得到结果.
文辑创建者
我要分享 >
职位:公路工程材料员
擅长专业:土建 安装 装饰 市政 园林
相关编辑
文辑推荐
知识推荐
百科推荐