足球机器人场地白线提取方法
2025-01-19
基于折反射原理的全景视觉系统,由于能获得大范围视野的环境信息、因其高实时性和高性价比而被广泛应用在视频监控、视频会议和足球机器人等领域。但是,该系统采用的凸面反射镜,由于存在对场景的压缩而使得实际场景中的一些规则物体(比如直线)的成像存在很大的变形,给提取这些特征带来了困难。而足球机器人比赛场景中的白色标志线是不可多得的参考信息,如果能快速准确地提取出全部或部分白色标志线信息,将给机器人的决策系统提供很大的帮助,从而提高机器人的整体性能。以足球机器人比赛环境为背景,将场地白色标志线的边缘像素点转化到:实际距离和图像像素距离成线性变换关系的图像空间,利用一种结合数字罗盘航向角度信息的Hough变换方法提取场地白色标志线信息。试验证明该方法具备很大的可行性。

 中型足球机器人电磁铁式踢球机构的建模与控制
中型足球机器人电磁铁式踢球机构的建模与控制 运用机理建模的方法,简化电容和电磁铁的工作模式,建立电磁铁式踢球机构的物理与数学模型。实验表明:该模型能够精准反映机构性能,且控制简单。
小型足球机器人踢球器机电一体化设计 装有踢球器的机器人可以出色地完成机器人足球比赛任务。本文对踢球器的概念设计进行了分析,比较详细地说明了robocup小型足球机器人的具体设计和工作原理。通过机械部分“智能化”的设计,使得踢球器的控制过程简单而有效,具有很强的鲁棒性,较好地适应了整个机器人的性能要求。
编辑推荐下载
格式:pdf
大小:499KB
页数:3P
人气:63
 4.5
4.5
小型足球机器人踢球器机电一体化设计 装有踢球器的机器人可以出色地完成机器人足球比赛任务。对踢球器的概念设计进行了分析,比较详细地说明了robocup小型足球机器人的具体设计和工作原理。通过机械部分"智能化"的设计,使得踢球器的控制过程简单而有效,具有很强的鲁棒性。较好地适应了整个机器人的性能要求。
格式:pdf
大小:350KB
页数:4P
人气:63
4.7
足球机器人气动踢球系统建模与射程控制 针对robocup中型组足球机器人比赛需求,设计一套可以精确控制踢球距离的气动踢球系统。同时对系统进行建模分析,在大量实验的基础上,采用多元线性回归分析的方法确定影响踢球效果的各因素之间的关系。最后对系统进行了验证,使踢球的第一落点达到"要踢多远就踢多远"的效果,实现精确的射程控制。
热门文档 足球机器人场地白线提取方法
格式:pdf
大小:102KB
页数:5P
人气:63
4.7
基于场地分区的机器人足球守门员防守策略设计 通过对场地分区处理,提出了以小球为中心的守门员积极防守策略.在定义守门员3个属性的基础上,设计了小球在球场中不同区域内时守门员的具体防守策略.该策略针对小球运动的各种情况,及时调整守门员在球门区的位置与姿态,实现守门员的高效防守.实际比赛结果证明了所设计的策略是有效的.

格式:pdf
大小:1.8MB
页数:2P
人气:63
4.7
机器人焊接结构件内档工艺改进方法 应用机器人焊接技术提高液压支架结构件焊接质量和生产效率,保证焊接工作的稳定性和焊接质量的一致性,才能提高产业竞争力。
格式:pdf
大小:13.4MB
页数:65P
人气:63
4.6
东南大学 硕士学位论文 基于阻抗控制的机器人柔顺性控制方法研究 姓名:杨振 申请学位级别:硕士 专业:控制理论与控制工程 指导教师:孟正大 20050601 基于阻抗控制的机器人柔顺性控制方法研究 作者:杨振 学位授予单位:东南大学 本文读者也读过(6条) 1.王芳.杨振.wangfang.yangzhen基于阻抗控制的机器人力控制算法性能分析[期刊论文]-制造业自动化 2010,32(9) 2.谢为国阻抗控制算法在机器人火炬交接中的应用[学位论文]2006 3.王坤东.颜国正.鄢波.wangkundong.yanguozheng.yanbo基于被动柔顺性的机器人位置/力控制[期刊论文]- 中国机械工程2006,
精华文档 足球机器人场地白线提取方法
格式:pdf
大小:33KB
页数:3P
人气:63
4.7

1 1、工业领域中一般多用6关节型机器人,根据所学内容谈谈 该种机器人都有哪些部件组成,每个部件的工作原理及选择 该部件的依据(800字以上) 目前各大工业机器人厂商提供的六轴关节机器人结构从外观上看大同小异,相差不大,从本 质上来说,其结构应该都是一致的,即其第一关节旋转轴(基座旋转轴)、第四关节旋转轴、 第六关节旋转轴(手腕端部法兰安装盘的旋转中心)在同一个平面内;第二关节旋转轴、第 三关节旋转轴以及第五关节旋转轴互相平行,而且与前面提到到平面垂直;另外,还需要保 证第四关节旋转轴线、第五关节旋转轴线以及第六关节旋转轴线相交于一点。采用该种结构 的工业机器人可以使得其运动学算法最为简单可靠。设计的机器人要保证高的定位精度,就 必须尽可能的满足上述条件,通过机械加工及装配精度来保证最终的机器人运行精度控制在 一定范围内。如果机器人的结构与此差别较大的话
格式:pdf
大小:2.6MB
页数:12P
人气:63
4.4

作图步骤: 1、双击桌面robotstudio5.15图标,如下图所示。 点击左侧选项栏,选择授权。 然后选择激活向导,选择如下: 2、点击创建文件,出现如下界面。 3、选择机器人模型,点击abb模型库,出现如下界面,选择irb2600.把承重能力改为20kg. 4、然后点击导入模型库,下拖选择mytool后,然后把左侧边mytool工具拖到 irb2600-20-165-01,机器人上自动安装了喷头工具。 5、然后点击机器人系统菜单,选择从布局创建系统。 在此项目中,可以在名称处修改系统的名称,尤其在系统多的情况下。在主菜单中,一定要 修改工具,把原始的tool10改为mytool。或者,在放入机器人时,即完成此项设置,可以 不需要修改此项。 一直选择下一个,即可成功。 成功后,屏幕右下角变为绿色。 5、选择建模,在菜单中选择固体,再选择矩形体。
格式:pdf
大小:457KB
页数:6P
人气:63
4.5

1 机 器 人 实 验 报 告 册 制作人:叶翔徐培嘉陈琳 制作日期:2012年12月 2 目录 1、中国机器人大赛双足竞步机器人比赛规则简述............3 2、双足竞步机器人构成简介.......................3 3、功能及其改进方案简介.........................4 4、设计与制作软件简介...........................4 5、比赛功能简介.................................5 6、制作心得体会.................................6 3 一、中国机器人大赛双足竞步机器人比赛规则简述 1、交叉足印竞步机器人: 结构只有双足、并只能以走路的方式来移动,机器人要分清楚正面及背面, 以箭头方向作为正面,是自主式脱线控制,用
格式:pdf
大小:289KB
页数:1P
人气:63
4.6
iPad专用机器人支架诞生 美国创业公司doublerobotics开发了一款名为double的机器人。它由一部ipad、一个支架和电动两轮底座组成,支持远程操纵,能实现前进、转弯等动作,可以在公司或家里使用。它能伸展至5英尺高,或折叠至5.6英尺,从而模拟操纵者的站姿或坐姿。doubletelepresencerobot目前售价1999美元,折合人民币约12477元,对于那种公事繁忙,又抽不出身去参加各种会议的大佬们来说,这个东西真的是个不错的贴心宝贝。
格式:pdf
大小:27KB
页数:4P
人气:63
4.3
灭火机器人 机器人这个概念早已家喻户晓,它是自动执行工作的机器装置,可以协助或者取代人类从 事多种工作。由机器人来代替人类在危险的工作环境中工作,尤其是特殊紧急险情等危害公 共安全时,机器人发挥着越来越重要的作用。本文仅就消防机器人在国内外的发展现状做简 要介绍,并对消防机器人在实际中的应用及改进方向做较为详尽的阐述,供广大同仁参考。 “机器人”一词问世以来,一直成为高科技高尖端的代名词。世界发达国家均在机器人 的研发上投入大量的人力财力。机器人是自动执行工作的机器装置,可以协助或者取代人类 从事多种工作。近年来,机器人已经在很多国家的多个行业逐步代替了手工,是人力资源匮乏 国家解决劳动力问题的上佳选择。而由机器人来代替人类在危险的工作环境中工作,尤其是 危害公共安全的火灾、毒气、爆炸等特殊紧急险情时,机器人发挥着越来越重要的作用。消 防事业直接服务于经济建设,高
最新文档 足球机器人场地白线提取方法
格式:pdf
大小:2.1MB
页数:2P
人气:63
4.7
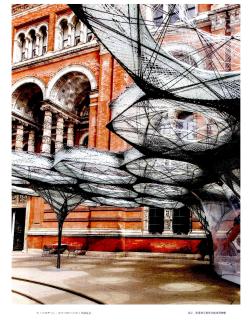
如果机器人生产工艺流行开来、那么诸如“工匠”“手工艺”这样的词汇或许很快就会过时。在伦敦维多利亚和阿尔伯特博物馆外,矗立着一个户外展亭,其结构由斯图加特大学的建筑师和工程师根据甲虫外壳设计,这种外壳韧性超强、重量很轻,具有保护作用。
格式:pdf
大小:1.7MB
页数:1P
人气:63
4.5
机器人自动化弧焊生产线研究 随着我国经济及自动化技术的快速发展,机器人自动化弧焊生产线中的应用越来越广泛,这在很大程度上减少了劳动力的使用,降低了焊接过程中失误的频率,为产品质量的提高及成本的降低提供了保障.基于此,本文章对生产线应用过程中的存在的问题及解决措施做出了详细介绍.
格式:doc
大小:30KB
页数:1P
人气:63
3.9

埃科润滑脂eccogreaselg1600是由脲类化合物稠化合成油,并加有极压抗磨、抗氧、防漏、防锈等多种添加剂精制而成的工业机器人专用润滑脂。
格式:doc
大小:31KB
页数:1P
人气:63
3.9
埃科润滑脂eccogreaselg1600是由脲类化合物稠化合成油,并加有极压抗磨、抗氧、防漏、防锈等多种添加剂精制而成的工业机器人专用润滑脂。
格式:pdf
大小:939KB
页数:19P
人气:63
4.4

来源网络 工业机器人技术专业实训室建设方案 该工业机器人实训体系建设方案是根据目前工业机器人建设的最新要求,吸收国内外同类建 设方案优点,充分考虑学校区域工业机器人发展特点和区域人才培养的需求,并结合工业机器人 教学的特点精心构建而成。 该建设方案集成多种实验实训系统,提供了众多实验例程与典型应用,便于学生、老师熟悉 和掌握工业机器人的实际应用。 为符合学校物工业机人专业的建设目标和要求,实训室方案的丰富建设经验与优势、以及专 业的定制化服务能力,根据学校的需求,特此设计提出了一个以院校专业学科建设为宗旨的工业机 器人应用实训室综合解决方案,方案包含工业机器人的基础实训室建设和工业机器人典型应用实训 室建设。 来源网络 2实训体系配置及预算 注:本配置表是按照专业建设最全面的设备来配置,仅供参考,我司会根据合作院校的具 体需求来定制化配置或调整。 述特
格式:pdf
大小:74KB
页数:2P
人气:63
4.4
涵道捡乒乓球机器人的设计与实现探究 文章设计了一种自动乒乓球捡球机器人,该机器人采用stm32单片机作为控制系统,利用涵道的高速旋转,使壳体内外产生一定的压强差,将外界的乒乓球压进壳体,实现自动捡球的目的,在装置的最底部安装了可以旋转的拨球装置,尽量的做到整个壳体的密闭性。
格式:pdf
大小:514KB
页数:未知
人气:63
4.7
基于MSP430的微型足球机器人无线通信子系统的设计 无线通信子系统是微型足球机器人比赛系统中的至关重要部分,它起到桥梁的作用。论文采用msp430f149单片机作为无线发送和接收控制芯片,首先上位机将控制命令通过计算机串口传输到单片机中,然后单片机控制无线发射装置将指令以广播的方式发送给装有无线接收芯片的足球机器人,最后机器人上的控制芯片按照接收到的指令决定足球机器人左右轮的转速,从而实现对足球机器人的控制。
格式:pdf
大小:190KB
页数:3P
人气:63
4.7
一种新型球形机器人的结构设计 针对目前球形机器人存在的结构复杂,控制困难等问题。在基于重心偏摆与力矩复合驱动的原理上,文章设计了一款控制配重块摆动的新型遥控球形机器人,重点分析其运动原理,建立系统的数学模型,并制作了一台样机。实验测试表明:该球形机器人的结构简单,可实现沿任意曲率的曲线运动以及任意转向的控制,且定位性能和复位性能好。
格式:pdf
大小:174KB
页数:未知
人气:63
4.7
机器人舵机控制器设计 舵机是一种位置伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。伺服电机是指在伺服系统中控制机械元件运转的发动机,是一种补助马达间接变速装置。在本设计中,我们采用单片机来驱动舵机工作,单片机通过改变输出的pwm信号占空比来控制舵机的转角与转速;舵机能够实现正转、反转、自动旋转等功能;为了更直观地显示转角,我们采用了四位八段数据管用于实时显示。

文辑创建者
我要分享 >
职位:建筑工程质量安全管理工程师
擅长专业:土建 安装 装饰 市政 园林
相关编辑
文辑推荐
知识推荐
百科推荐