GPS软件接收机基础
《GPS软件接收机基础》是2007年电子工业出版社出版的图书,作者是(美)崔保延。
-
选择特殊符号
选择搜索类型
请输入搜索
《GPS软件接收机基础》是2007年电子工业出版社出版的图书,作者是(美)崔保延。
第1章 概述
1.1 引言
1.2 GPS的发展史
1.3 GPS接收机基本原理
1.4 内容的组织方法
1.5 软件方式
1.6 软件方式潜在的优势
1.7 本书的结构
参考文献
第2章 GPS的基本概念
2.1 引言
2.2 GPS的性能要求
2.3 GPS的基本概念
2.4 确定用户位置的基本方程
2.5 伪距测量
2.6 根据伪距求用户位置
2.7 多于4颗卫星的位置计算方法
2.8 球坐标系中的用户位置
2.9 地球几何学
2.10 椭圆中的基本关系
2.11 高度的计算
2.12 大地纬度的计算
2.13 地球表面任一点的计算
2.14 卫星选择
2.15 误差放大因子
2.16 小结
参考文献
附录A 程序1
第3章 卫星星座
3.1 引言
3.2 GPS系统的控制区段
3.3 卫星星座
3.4 来自不同卫星的最大功率电平差值
3.5 恒星日
3.6 多普勒频移
3.7 多普勒频率的平均变化速率
3.8 多普勒频率的最大变化速率
3.9 用户加速度产生的多普勒频率的变化速率
3.10 开普勒定律
3.11 开普勒方程式
3.12 真近点角和平近点角
3.13 用户位置处的信号强度
3.14 小结
参考文献
第4章 地心地固坐标系
4.1 引言
4.2 方向余弦矩阵
4.3 卫星轨道参照系向赤道参照系的转换
4.4 春分
4.5 地球的自转
4.6 从轨道参照系到地心地固参照系之间的全部变换
4.7 摄动
4.8 发射时刻GPS系统时间的修正
4.9 卫星位置计算
4.10 卫星坐标调整
4.11 星历数据
4.12 小结
参考文献
第5章 GPS C/A码信号结构
5.1 引言
5.2 传输频率
5.3 码分多址(CDMA)信号
5.4 P码
5.5 C/A码及数据格式
5.6 C/A码的产生
5.7 C/A码的相关性
5.8 导航数据位
5.9 遥测(TLM)字和交接字(HOW)
5.10 GPS时间和卫星Z计数
5.11 奇偶校验算法
5.12 子帧1的导航数据
5.13 子帧2和子帧3的导航数据
5.14 子帧4和子帧5的导航数据--辅助数据
5.15 电离层模型
5.16 对流层的模型
5.17 选择可用性(SA)及典型的定位误差
5.18 小结
参考文献
附录A 程序1
第6章 接收机硬件设计
第7章 GPS C/A码信号的捕获
第8章 GPS信号跟踪
第9章 GPS软件接收机
第10章 弱信号的捕获
第11章 弱信号的跟踪
第12章 GPS接收机相关的一些内容
好一点的应该在400左右,还需要单独配麦克,麦克10几20块吧! 基本是准前装的价格了! 后装市场的应该能便宜些! 不过蓝...
几百几千的都有
首先要确定接受什么卫星,确定后可以在 找到你要接受卫星上面的参数,在就是寻星了。确定卫星后把接收机和天线(锅)。电视接好。如果你知道你要收看卫星的三个角位(极化角。仰角。方位角...

 GPS软件接收机基带电路设计
GPS软件接收机基带电路设计
GPS软件接收机基带电路设计
综合考虑了GPS接收机的内部结构、工作原理和相关器设计参数,采用电子设计自动化设计方法,设计了基于现场可编程阵列的GPS接收机基带处理电路,电路采用VHDL语言实现并在QUATUSⅡ上进行了时序仿真。仿真结果和实际测试表明,电路工作正常,在软件的控制下可以对GPS基带信号进行处理,且性能可靠,具有很高的应用价值。最后,对于GPS现代化的BOC调制技术进行了分析。
 GPS接收机检验
GPS接收机检验
GPS接收机检验
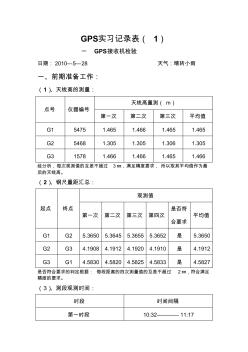
GPS实习记录表( 1) 一 GPS接收机检验 日期: 2010—5—28 天气:晴转小雨 一、前期准备工作: (1)、天线高的测量: 点号 仪器编号 天线高量测( m) 第一次 第二次 第三次 平均值 G1 5475 1.465 1.466 1.465 1.465 G2 5468 1.305 1.305 1.306 1.305 G3 1578 1.466 1.466 1.465 1.466 经分析,每次观测值的互差不超过 3㎜,满足精度要求, 所以取其平均值作为最 后的天线高。 (2)、钢尺量距汇总: 起点 终点 观测值 第一次 第二次 第三次 第四次 是否符 合要求 平均值 G1 G2 5.3650 5.3645 5.3655 5.3652 是 5.3650 G2 G3 4.1908 4.1912 4.1920 4.1910 是 4.1912 G3 G1 4.5830 4.5
GPS接收机能同时接收多颗GPS卫星的信号,而GPS多通道接收机具有多个通道,能同时且连续地跟踪多颗卫星,以实现快速简单定位。
多通道GPS接收机又称为并行通道接收机。这是当前GPS接收机的发展趋势。由于微电子技术的发展,在一块芯片上可以做5、6、8、9、12通道,且通道间的时延偏差很小。有的精密接收机还能进行通道间的自校正。它能同时观测几颗卫星。
一个多通道GPS接收机的组成框图如下图所示。

通常采用一个无源的带通滤波器对所接收到的射频卫星信号进行滤波, 以减小带外射频干扰。 通过前置低噪声放大器(LNA)放大后, 射频信号下变频到中频(IF)。模/数(A/D)转换器对IF信号进行采样,A/D采样速率典型情况下为PRN基码速率的8~12倍(对于L1 C/A码PRN速率为1.023 MHz,对于L1和L2 P(Y)码为10.23 MHz)。
最小采样速率是码的截止带宽的2倍,以满足奈奎斯特判定的要求。对于只接收L1 C/A码的接收机,截止带宽大于2 MHz,而对于接收P(Y)码的接收机,截止带宽大于20 MHz。
过采样会降低接收机对于A/D量化噪声的敏感度,因而减少在A/D转换器中所需的位数。采样结果送到数字信号处理器(DSP)中。DSP包含N个并行通道,以同时跟踪来自多达N(5<N<12)颗卫星的载频码。每个通道中包含码和载波跟踪环,以完成码和载波的相位测量,以及导航电文数据的解调。
通道可以计算三种不同的测量值:伪距、Δ距离(有时称做Δ伪距)和积分多普勒频移。所希望的测量值和解调后的导航消息数据送至基带处理器。基带处理器对接收机信号的截获、跟踪和数据采集进行控制,并处理接收机的测量值形成PVT解。在一些应用中,也可用专门的微处理器同时完成PVT的计算和相关联的导航功能。
《GPS接收机硬件实现方法》主要讲述了,虽然目前关于GPS接收机的许多著作都旨在讲解一些与作者各自工作紧密相关的内容,而《GPS接收机硬件实现方法》则是采用尽可能少的数学公式总结了一些基本的原理,详细描述了构建一个精度在300m内的GPS接收机所必需遵循的设计规范和电路结构。书中专门安排章节讲述了GPS信号结构与数据流、接收机细节(使用混合设计作为范例),以及一些更为先进的接收机和相关主题。包括时间与频率测量等。随后讨论了ZarlinkGPS接收机的芯片组,全面介绍了一种已研制成功的最为精确的接收机--TurboRogLJe接收机。