PID整定Z - N参数整定法
Ziegler-Nichol响应曲线法 ,是根据被控对象的阶跃响应曲线获取被控对象的模型式(1),根据模型的增益K,时间常数T以及纯滞后时间,再利用如下的经验公式(2)整定PID控制器参数。
公式(1):
公式(2): , ,
一般来说由于Z-N整定的PID控制器超调较大。为此C.C.Hang提出改进的Z-N法[8],通过给定值加权和修正积分常数改善了系统的超调。这种方法被认为是Z-N法最成功的改进。
Ziegler-Nichols临界振荡法只对开环稳定对象适用。该方法首先对被控对象施加一个比例控制器,并且其增益很小,然后逐渐增大增益使系统出现稳定振荡·则此时临界振荡增益就是比例控制器的数值K,,振荡周期就是系统的振荡周期凡,然后根据公式(3)整定PID控制器参数。
公式(3): , ,
类似的整定方法有Cohen-Coon响应曲线方法[9],该方法同Ziegler-Nichols响应曲线法操作相同,只是整定公式不同,其整定公式如式(4):
公式(4): , ,
PID整定基于误差性能指标的整定方法
为评价控制性能的优劣,定义了多种积分性能指标,基于误差性能指标的参数整定方法 是以控制系统瞬时误差函数e(θ,t)的泛函积分评价Jn(θ)为最优控制指标,它是评价控制系统性能的一类标准,是系统动态特性的一种综合性能指标,一般以误差函数的积分形式表示。其中Jn(θ)的基本形式如式(5):
公式(5):
n=0,m=0IAE
n=0,m=2ISE
n=1,m=2ISTE
Jn(θ)可以是ISE,1AE,1STE,1TAE等,然后经过寻优,搜索出一组PID控制器参数Kc,T�i,Td,使Jn(θ)的取值为最小,此时的PID控制器参数为最优。
PID整定内模整定
根据内模控制系统 , 与常规反馈控制系统间存在的对应关系,必要时对模型进行降阶简化处理,便可完成IMC-PID设计
图中Gp(s)为实际被控过程对象,Gm(s)为被控过程的数学模型,即内部模型,Q(s)为内模控制器,它等于Gm(s)的最小相位部分的逆模型。u为内模控制器的输出,r,y,d分别为控制系统的输入、输出和干扰信号。
为抑制模型误差对系统的影响,增强系统的鲁棒性,在控制器中加人一个低通滤波器F(s),一般F(s)取最简单形式如下:
公式(6):
式中阶次n取决于模型的阶次以使控制器可实现,r为时间常数。则内模控制等效的控制器为:
公式(7):
对于如式(1)表示的一阶加纯滞后过程,采用一阶Pade近似,得到如下模型:
公式(8):
将式(8)的最小相位部分代入式(7),可得到如下的PID控制器参数:
公式(9):,,2100433B

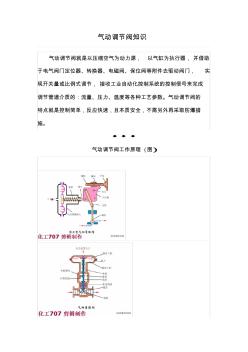 气动调节阀知识
气动调节阀知识