闭环控制
闭环控是指控制论的一个基本概念。指作为被控的输出以一定方式返回到作为控制的输入端,并对输入端施加控制影响的一种控制关系。在控制论中,闭环通常指输出端通过"旁链"方式回馈到输入,所谓闭环控制。输出端回馈到输入端并参与对输出端再控制,这才是闭环控制的目的,这种目的是通过反馈来实现的。
-

选择特殊符号
选择搜索类型
请输入搜索
闭环控是指控制论的一个基本概念。指作为被控的输出以一定方式返回到作为控制的输入端,并对输入端施加控制影响的一种控制关系。在控制论中,闭环通常指输出端通过"旁链"方式回馈到输入,所谓闭环控制。输出端回馈到输入端并参与对输出端再控制,这才是闭环控制的目的,这种目的是通过反馈来实现的。
当受控客体受干扰的影响,其实现状态与期望状态出现偏差时,控制主体将根据这种偏差发出新的指令,以纠正偏差,抵消干扰的作用。在闭环控制中,由于控制主体能根据反馈信息发现和纠正受控客体运行的偏差,所以有较强的抗干扰能力,能进行有效的控制,从而保证预定目标的实现。管理中所实行的控制大多是闭环控制,所用的控制原理主要是反馈原理。这种控制如果我们把输入值用x表示,输出值用y表示,客体的功能用s表示,控制系统也即反馈系统的作用用R表示,偏差信息用△x表示,
则有:y=S(X+△X)=S(X+Ry)=SX+SRy
式中R称反馈因子或控制参数,它反映闭环控制系统的反馈功能或控制功能。
闭环控制在各种控制实例中有具体的表现方式:
正反馈与负反馈是闭环控制常见的两种基本形式。其中负反馈与正反馈从达到目的的角度讲具有相同的意义。从反馈实现具体方式来看,正反馈与负反馈属于代数或者算术意义上的"加减"反馈方式,即输出量回馈至输入端后,和输入量进行加减的统一性整合后,作为新控制输出,去进一步控制输出量。实际上,输出量对输入量回馈远不止这些方式。这表现为:运算上,不仅仅是加减运算,还包括了更广域的数学运算;回馈方式上,输出量对输入量回馈,也不一定采取和输入量进行综合运算形成统一的控制输出,输出量能通过控制链直接施控于输入量等等。
发动机电喷系统的闭环控制是一个实时的氧传感器、计算机和燃油量控制装置三者之间闭合的三角关系。氧传感器"告诉"计算机混合气的空燃比情况,计算机发出命令给燃油量控制装置,向理论值的方向调整空燃比(14.7:1)。这一调整经常会超过一点理论值,氧传感器察觉出来,并报告计算机,计算机再发出命令调回到14.7:1。因为每一个调整的循环都很快,所以空燃比不会偏离14.7:1,一旦运行,这种闭环调整就连续不断。采用闭环控制的电喷发动机,由于能使发动机始终在较理想的工况下运行(空燃比偏离理论值不会太多),从而能保证汽车不仅具有较好的动力性能,还能省油。
双闭环回路中,内环给定的电压值在正常情况下是相同的,当内环电压值升高或降低的时候对应外环就有一个电压差,进而给出一个大小不一的电信号进而进行总内环电路的电压升高或降低。外环的作用就相当于一个参照,比如...
简单说就是对控制对象设置给定值,以实际值与给定值的差值作为变频器的调节源。如风机采用变频调节,给定出口某段风压,若实际值高于给定值,变频器自动降速,反之自动升速,不需人调节。
什么叫开环控制,半闭环控制,闭环控制?三者有何区别?并试举例说明。
开环控制没有反馈环节,系统的稳定性不高,响应时间相对来说很长,精确度不高,使用于对系统稳定性精确度要求不高的简单的系统。开环控制是指控制装置与被控对象之间只有按顺序工作,没有反向联系的控制过程。按这种...
闭环控制是根据控制对象输出反馈来进行校正的控制方式,它是在测量出实际与计划发生偏差时,按定额或标准来进行纠正的。闭环控制,从输出量变化取出控制信号作为比较量反馈给输入端控制输入量,一般这个取出量和输入量相位相反,所以叫负反馈控制,自动控制通常是闭环控制。比如家用空调温度的控制。
在闭环控制系统里,即使有干扰,也能通过自己的调节保持原来的状态。实施闭环控制的抗干扰能力来自于反馈作用。因为在组织形式上增设了一个反馈机构,能把造成偏离目标的原因以及一贯干扰的因素及时地反馈给控制者,使决策控制层作出正确的决策,随时修正目标。
闭环控制的优点是充分发挥了反馈的重要作用,排除了难以预料或不确定的因素,使校正行动更准确,更有力。但它缺乏开环控制的那种预防性。如在控制过程中造成不利的后果才采取纠正措施。
开环控制系统:不将控制的结果反馈回来影响当前控制的系统
举例:打开灯的开关--按下开关后的一瞬间,控制活动已经结束,灯是否亮起已对按开关的这个活动没有影响;投篮--篮球出手后就无法再继续对其控制,无论球进与否,球出手的一瞬间控制活动即结束。
闭环控制系统:可以将控制的结果反馈回来与希望值比较,并根据它们的误差调整控制作用的系统
举例:调节水龙头--首先在头脑中对水流有一个期望的流量,水龙头打开后由眼睛观察现有的流量大小与期望值进行比较,并不断的用手进行调节形成一个反馈闭环控制;骑自行车--同理,不断的修正行进的方向与速度形成闭环控制。
开环闭环的区别:1、有无反馈;2、是否对当前控制起作用。开环控制一般是在瞬间就完成的控制活动,闭环控制一定会持续一定的时间,可以借此判断。
投篮第一次投篮投近了第二次投的时候用力一些,这也是一种反馈但不会对第一次产生影响了,所以是开环控制。
开环控制没有反馈环节,系统的稳定性不高,响应时间相对来说很长,精确度不高,使用于对系统稳定性精确度要求不高的简单的系统,开环控制是指控制装置与被控对象之间只有按顺序工作,没有反向联系的控制过程,按这种方式组成的系统称为开环控制系统,其特点是系统的输出量不会对系统的控制作用发生影响,没有自动修正或补偿的能力。
闭环控制有反馈环节,通过反馈系统使系统的精确度提高,响应时间缩短,适合于对系统的响应时间,稳定性要求高的系统。
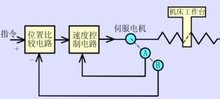
半闭环控制系统是在开环控制系统的伺服机构中装有角位移检测装置,通过检测伺服机构的滚珠丝杠转角间接检测移动部件的位移,然后反馈到数控装置的比较器中,与输入原指令位移值进行比较,用比较后的差值进行控制,使移动部件补充位移,直到差值消除为止的控制系统。这种伺服机构所能达到的精度、速度和动态特性优于开环伺服机构,为大多数中小型数控机床所采用。
《自动控制理论》、《现代控制理论》、《数控技术》等。

 一种基于双闭环控制的并联Buck均流器设计
一种基于双闭环控制的并联Buck均流器设计
一种基于双闭环控制的并联Buck均流器设计
直驱式永磁同步风电系统电机侧变换器的一种常见拓扑结构为二极管整流桥后接Boost斩波电路。此结构具有较强的非线性,采用普通PI控制器很难使系统在正常运行范围内保持较好动态性能。本文基于双闭环控制方法,设计了基于Buck电路的并联均流器,并进行了相关仿真和试验。
探讨PLC电机闭环控制系统的改造
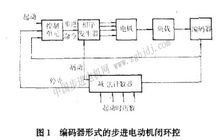
探讨PLC电机闭环控制系统的改造
用西门子 S7-200 PLC、步进电机驱动器和编码器对步进电机闭环控制系统进行改造,阐述系统的控制原理,给出系统流程图及软件实现方法.实践结果证明 改造后的控制系统结构简单、性能稳定,编程容易,可靠性高.高精度和低成本要求得以实现.
半闭环控制系统:半闭环控制系统是在开环控制系统的伺服机构中装有角位移检测装置,通过检测伺服机构的滚珠丝杠转角, 间接检测移动部件的位移,然后反馈到数控装置的比较器中,与输入原指令位移值进行比较,用比较后的差值进行控制,使移动部件补充位移,直到差值消除为止的控制系统。由于半闭环控制系统将移动部件的传动丝杠螺母不包括在环内,所以传动丝杠螺母机构的误差仍会影响移动部件的位移精度,由于半闭环控制系统调试维修方便,稳定性好,目前应用比较广泛。半闭环控制系统的伺服机构所能达到的精度、速度和动态特性优于开环伺服机构,为大多数中小型数控机床所采用。
闭环控制系统在控制上具有以下特点:由于输出信号的反馈量与输入量作比较产生偏差信号,利用偏差信号实现对输出量的控制或者调节,所以系统的输出量能够自动地跟踪输入量,减小跟踪误差,提高控制精度,抑制扰动信号的影响。除此之外,负反馈构成的闭环控制系统还有其他的优点:引入反馈通路后,使得系统对前向通路中元器件参数的变化不灵敏,从而使系统对于前向通路中元器件的精度要求不高;反馈作用还可以使得整个系统对于某些非线性影响不灵敏。
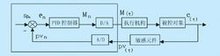
基于反馈原理建立的自动控制系统。所谓反馈原理,就是根据系统输出变化的信息来进行控制,即通过比较系统行为(输出)与期望行为之间的偏差,并消除偏差以获得预期的系统性能。在反馈控制系统中,既存在由输入到输出的信号前向通路,也包含从输出端到输入端的信号反馈通路,两者组成一个闭合的回路。因此,反馈控制系统又称为闭环控制系统。反馈控制是自动控制的主要形式。自动控制系统多数是反馈控制系统。在工程上常把在运行中使输出量和期望值保持一致的反馈控制系统称为自动调节系统,而把用来精确地跟随或实现某种过程的反馈控制系统称为伺服系统或随动系统。
反馈控制系统由控制器、受控对象和反馈通路组成。比较环节是用来将输入与输出相减,给出偏差信号。这一环节在具体系统中可能与控制器一起统称为调节器。以炉温控制为例,受控对象为炉子;输出变量为实际的炉子温度;输入变量为给定常值温度,一般用电压表示。炉温用热电偶测量,代表炉温的热电动势与给定电压相比较,两者的差值电压经过功率放大后用来驱动相应的执行机构进行控制。