臂架型斗轮堆取料机文献

 斗轮堆取料机安装记录
斗轮堆取料机安装记录
斗轮堆取料机安装记录
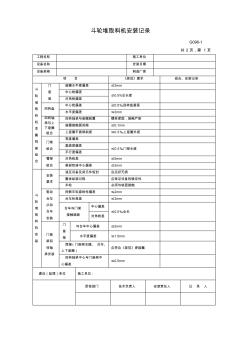
斗轮堆取料机安装记录 G096-1 共 2 页,第 1 页 工程名称 施工单位 设备名称 安装日期 设备规格 制造厂家 项 目 《规范》要求 组合、安装记录 斗 轮 堆 取 料 机 金 属 构 架 组 合 门 座 架 座圈水平度偏差 ≤2mm 中心线偏差 ≤0.5%总长度 对角线偏差 回转盘 中心线偏差 ≤0.5‰回转盘直径 水平度偏差 ≤2mm 回转轴 承与上 下座圈 组合 回转轴承与座圈装置 螺栓紧固,接触严密 座圈接触面间隙 ≤0.1mm 上座圈平面倾斜度 ≤0.5‰上座圈外径 门架 组合 宽度偏差 垂直度偏差 ≤0.5‰门架长度 平行度偏差 臂架 组合 对角线差 ≤5mm 根部铰座中心偏差 ≤2mm 斗 轮 堆 取 料 机 安 装 安装 要求 液压设备及其元件铅封 应完好无损 整体组装过程 应保证设备的稳定性 车轮 必须与轨面接触 驱动 台车 从动 台车 安装 同侧车轮
 第三章斗轮堆取料机讲解
第三章斗轮堆取料机讲解
第三章斗轮堆取料机讲解
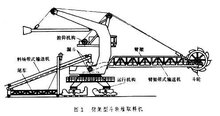
75 第三章 斗轮堆取料机 一 、概述 煤场机械的种类很多 , 常用的有 :斗轮堆取料机、 门式滚轮机及装卸桥。 煤场机械形式的 选择 ,取决于煤场的形状。斗轮堆取料机常用于条形煤场中。 斗轮堆取料机是在斗轮挖掘机的基础上发展起来的 ,是一种大型、连续、高效的散料装 卸机械。它具有生产效率高、能耗低、自重轻、投资省及操作简便等优点。 斗轮机的形式很多 ,其分类方法也较多。按行走机构的形式 , 斗轮堆取料机可分为履带 式、轮胎式及轨道式三种;按斗轮臂架的平衡方式 ,斗轮堆取料机可分为活配重式、死配重 式及整体平衡式三种;按理论生产能力 , 斗轮堆取料机可分为轻型斗轮堆取料机 (生产率在 630m3/h以下的斗轮堆取料机为轻型 )、中型斗轮堆取料机 (生产率在 630~ 2500m3/h之间的斗 轮堆取料机为中型斗轮堆取料机 )、大型斗轮堆取料机 (生产率在 25O0~5000m3凡之间的斗