大疆S1000+八轴多旋翼航拍飞行器文献

 四旋翼飞行器PID控制器设计
四旋翼飞行器PID控制器设计
四旋翼飞行器PID控制器设计
设计了四旋翼飞行器PID控制器,通过对位置坐标和姿态角PID控制器参数调节,使与位置和姿态相关的6个自由度的最终输出值与相应的期望值相等,达到设计要求。Matlab仿真实验结果表明:该PID控制器能有效地实现飞行器位置控制和姿态控制,且具有较强的鲁棒性。
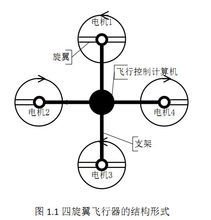
四轴旋翼飞行器结构设计与模态分析
四轴旋翼飞行器结构设计与模态分析
通过分析四轴旋翼飞行器的飞行原理,基于UG NX环境进行了四轴旋翼飞行器的自顶向下的机械结构总体设计,并在FEM集成模式下对机架的结构模态进行了求解,得到了机架的10阶模态。结果表明:本文设计的快速插接式机架结构,最低自然频率低于振源频率,可以有效避免振源的激振,且结构比载重余量较大,扩展性高。