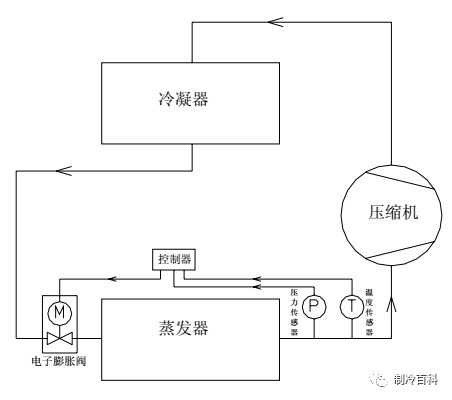
电子膨胀阀的优点使其在空调机尤其是变频多联机得到广泛应用。通常,空调机和变频多联机在室外机和室内机都分别有一个电子膨胀阀。在制冷时,室外机的电子膨胀阀全开,室内机的电子膨胀阀进行排气过热度控制,使系统和压缩机处在稳定可靠的运行区域。在制热时,室外机的电子膨胀阀进行排气过热度控制,室内机的电子膨胀阀根据各个室内机的容量进行冷媒量分配,使各个室内机的制热效果达到最佳。在空调机制冷或制热过程中,根据温度和压力来调节电子膨胀阀的阀体开度从而达到控制温度的具体技术措施2012年5月之前技术中已经存在大量的描述,在此不再赘述。《电子膨胀阀的驱动控制装置及方法》中,电子膨胀阀指的是利用直流电机技术的电子膨胀阀。
根据《电子膨胀阀的驱动控制装置及方法》,为了克服由于电机的启动转矩不足导致电子膨胀阀不能有效的驱动以及由于转子与定子相对位置的偏移导致启动失步的缺陷,在电子膨胀阀启动和停止时都对电机的转子和定子之间的位置进行二次定位。总得来说,在电子膨胀阀启动时,首先给电子膨胀阀的电机施加一个预定持续时间的保持电流,在电机的转子和定子之间产生磁场,利用该磁场产生的力矩对转子和定子之间的位置进行一次定位。然后,给电机施加一个预定脉冲数的附加脉冲信号使得电机转动一个微小角度,接着再次给电机施加另一个预定持续时间的保持电流,利用转子和定子之间的磁场产生的力矩来进行二次定位。接下来,给电机施加目标脉冲信号,使得电机转动相应的角度。作为选择,可以进一步在所述目标脉冲信号之后电机停止时,同样先给电子膨胀阀的电机施加一个预定持续时间的保持电流,在电机的转子和定子之间产生磁场,利用该磁场产生的力矩对转子和定子之间的位置进行一次定位。接着,给电机施加一个预定脉冲数的附加脉冲信号使得电机转动一个微小角度,接着再次给电机施加另一个预定持续时间的保持电流,利用转子和定子之间的磁场产生的力矩来进行二次定位。
下面详细描述《电子膨胀阀的驱动控制装置及方法》的具体实施方式。
图1示出了《电子膨胀阀的驱动控制装置及方法》实施例的配置有驱动控制装置的电子膨胀阀的结构示意图。如图1所示,电子膨胀阀包括驱动控制装置和本体部分。本体部分包括电机14和阀体15。该领域技术人员理解,驱动控制装置可以与本体部分是一体结构,也可以是完全分离的独立部件。图1所示的驱动控制装置包括处理单元10,驱动信号发生电路11和驱动电路12。处理单元10接收电子膨胀阀的期望阀体开度信号。期望阀体开度信号是由空调系统的主控器(未示出)发出的。期望阀体开度信号可以是表示阀体开度的角度信号,也可以是表示与阀体开度的角度信号相对应的脉冲信号的脉冲数。处理单元10根据期望阀体开度信号确定出期望阀体开度脉冲数。具体地,当期望阀体开度信号为脉冲数时,处理单元10将该脉冲数作为期望阀体开度脉冲数;当期望阀体开度信号为角度时,处理单元10将该期望阀体开度信号根据预先确定的算法将该角度信号转换为与表示阀体开度的角度信号相对应的脉冲信号的脉冲数,并将其作为期望阀体开度脉冲数。处理单元10根据期望阀体开度脉冲数与当前阀体开度脉冲数确定出需要使电子膨胀阀的电机转动的脉冲信号的转动脉冲数。其中,转动脉冲数为期望阀体开度脉冲数和当前阀体开度脉冲数的差值。《电子膨胀阀的驱动控制装置及方法》中,当前阀体开度脉冲数存储在存储器13中,存储器13可以位于处理单元11内部,也可以在处理单元11外部作为一个独立部件。驱动信号发生电路11根据处理单元10确定的转动脉冲数,产生相应脉冲数目的驱动脉冲信号。当处理单元10确定需要产生预定脉冲数的附加脉冲信号时,驱动信号发生电路11产生预定脉冲数的附加脉冲信号。处理单元10确定是否指示驱动信号发生电路11产生保持电流和预定脉冲数的附加脉冲信号。具体地,处理单元10确定期望阀体开度脉冲数与当前阀体开度脉冲数不同时,控制驱动信号发生电路11先输出第一预定持续时间的第一保持电流;然后,驱动信号发生电路11输出第一预定脉冲数的附加脉冲信号;接着处理单元10控制驱动信号发生电路11输出第二持续预定时间的第二保持电流。处理单元10监控驱动信号发生电路11的输出信号,当所述输出信号为转动脉冲数的驱动脉冲信号时,控制驱动信号发生电路11在转动脉冲数的驱动脉冲信号之后输出第三预定持续时间的第三保持电流;然后,驱动信号发生电路11输出第二预定脉冲数的附加脉冲信号;处理单元10控制驱动信号发生电路11输出第四个持续预定时间的第四保持电流。驱动信号发生电路11输出的信号输送到驱动电路12。驱动电路12对来自驱动信号发生电路的信号进行功率放大并施加到电机14上,使得电机14进行相应的动作。具体地,当从驱动信号发生电路11输出的信号为脉冲信号时,驱动电路12驱动电机14转动与脉冲信号的脉冲数相应的角度;当从驱动信号发生电路11输出的信号为保持电流信号时,驱动电路12在电机14的定子和转子磁场之间产生使电机定子和转子定位的力矩。
每一次根据转动脉冲数的脉冲信号驱动电机转动之后,处理单元10都将期望阀体开度脉冲数进行存储作为当前阀体开度脉冲数。
《电子膨胀阀的驱动控制装置及方法》中,保持电流为直流电流。
图2示出了根据发明的一个实施例的电子膨胀阀的驱动控制方法的流程图。如图2所示,在步骤201,处理单元10接收电子膨胀阀的期望阀体开度信号,并从期望阀体开度信号获得期望阀体开度脉冲数。如前所述,期望阀体开度信号是从空调系统的主控器发出。如果期望阀体开度信号为脉冲数,处理单元10将该脉冲数作为期望阀体开度脉冲数。如果期望阀体开度信号为角度信号,处理单元10根据预先确定的算法将该角度信号转换为与表示阀体开度的角度信号相对应的脉冲信号的脉冲数,并将其作为期望阀体开度脉冲数。
接下来,在步骤202,处理单元10从存储器中读取当前阀体开度脉冲数。处理单元10将期望阀体开度脉冲数与当前阀体开度脉冲数进行比较(步骤203),并且在二者不相同时,确定出需要使电子膨胀阀的电机转动的脉冲信号的转动脉冲数。如果期望阀体开度脉冲数与当前阀体开度脉冲数相同,则流程进行到步骤210。如果期望阀体开度脉冲数与当前阀体开度脉冲数不相同,处理单元10控制驱动信号发生电路11输出第一预定持续时间的第一保持电流给驱动电路12,经驱动电路12进行功率放大之后施加到电子膨胀阀的电机上,在电机的转子和定子之间产生磁场,利用该磁场产生的力矩对转子和定子磁场之间的相对位置进行一次定位(步骤204)。然后,驱动信号发生电路11在处理单元10的控制下输出第一预定脉冲数的附加脉冲信号,该附加脉冲信号经驱动电路12进行功率放大之后作用到电子膨胀阀的电机上使得电机转动一个微小角度(步骤205)。在步骤206,处理单元10再次控制驱动信号发生电路11输出第二持续预定时间的第二保持电流,经驱动电路12进行功率放大之后施加到电子膨胀阀的电机上,在电机的转子和定子之间产生磁场,利用该磁场产生的力矩对转子和定子磁场之间的相对位置进行二次定位。
接下来,处理单元10根据确定出的转动脉冲数,控制驱动信号发生电路11产生与转动脉冲数相应的转动脉冲信号,并输入到驱动电路12。转动脉冲信号经驱动电路12进行功率放大之后,施加到电子膨胀阀的电机上使电机转动与转动脉冲数相对应的角度(步骤207)。在步骤208,处理单元10指示驱动信号发生电路11产生一个附加电流,经驱动电路12功率放大后施加到电机上产生力矩。该实施例中,步骤208并不是必须的。在步骤209,处理单元10将期望阀体开度脉冲数存储到存储器中作为当前阀体开度脉冲数,流程结束于步骤210。
该实施例中,第一持续时间和第二持续时间可以相同,也可以不同,但均至少为50毫秒。作为选择,二者可以是60毫秒,70毫秒,80毫秒,90毫秒,100毫秒等。但是,为了不使电机过渡发热,第一持续时间和第二持续时间最好不超过1秒。
该实施例中,第一预定脉冲数优选地为1个脉冲。
众所周知,根据电子膨胀阀的特性,电机的驱动速率越慢则电机的励磁转矩越大。大转矩有助于电机启动时克服由于电子膨胀阀在长时间没有使用或有油或异物在阀体的被粘连卡死时产生的阻力,从而使得电机的转子和定子的相对位置能够定位。因此在该实施例中,为了克服电机的启动转矩不足导致电子膨胀阀不能有效的驱动以及由于转子与定子相对位置的偏移导致启动失步的缺陷,在根据转动脉冲数启动电机之前,首先给电机施加第一持续时间的保持电流,然后给电机施加一个附加脉冲数的脉冲信号,再给电机施加一个第二持续时间的保持电流。这样,利用二次施加的一定持续时间的保持电流,在电机上产生大的励磁转矩,克服电机的阻力并且完成电机的转子和定子相对位置的两次定位。这样,当给电机施加与转动脉冲数相应的脉冲信号时,就可以正确地控制电子膨胀阀的阀体开度。
图3示出了根据发明的另一个实施例的电子膨胀阀的驱动控制方法的流程图。在步骤301,如同步骤201一样,处理单元10接收电子膨胀阀的期望阀体开度信号,并从期望阀体开度信号获得期望阀体开度脉冲数。接下来,在步骤302,处理单元10从存储器中读取当前阀体开度脉冲数。处理单元10将期望阀体开度脉冲数与当前阀体开度脉冲数进行比较(步骤303),并且在二者不相同时,确定出需要使电子膨胀阀的电机转动的脉冲信号的转动脉冲数。如果期望阀体开度脉冲数与当前阀体开度脉冲数相同,则流程进行到步骤312。如果期望阀体开度脉冲数与当前阀体开度脉冲数不相同,处理单元10控制驱动信号发生电路11输出第一预定持续时间的第一保持电流给驱动电路12,经驱动电路12进行功率放大之后施加到电子膨胀阀的电机上,在电机的转子和定子之间产生磁场,利用该磁场产生的力矩对转子和定子之间的位置进行一次定位(步骤304)。然后,驱动信号发生电路11在处理单元10的控制下输出第一预定脉冲数的附加脉冲信号,该附加脉冲信号经驱动电路12进行功率放大之后作用到电子膨胀阀的电机上使得电机转动一个微小角度(步骤305)。在步骤306,处理单元10再次控制驱动信号发生电路11输出第二持续预定时间的第二保持电流,经驱动电路12进行功率放大之后施加到电子膨胀阀的电机上,在电机的转子和定子之间产生磁场,利用该磁场产生的力矩对转子和定子之间的位置进行二次定位。
接下来,处理单元10根据确定出的转动脉冲数,控制驱动信号发生电路11产生与转动脉冲数相应的转动脉冲信号,并输入到驱动电路12。转动脉冲信号经驱动电路12进行功率放大之后,施加到电子膨胀阀的电机上使电机转动与转动脉冲数相对应的角度(步骤307)。
在电子膨胀阀的电机转动与转动脉冲数相对应的角度之后,在步骤308,处理单元10控制驱动信号发生电路11输出第三预定持续时间的第三保持电流给驱动电路12,经驱动电路12进行功率放大之后施加到电子膨胀阀的电机上,在电机的转子和定子之间产生磁场,利用该磁场产生的力矩对转子和定子之间的位置进行一次定位。然后,驱动信号发生电路11在处理单元10的控制下输出第二预定脉冲数的附加脉冲信号,该附加脉冲信号经驱动电路12进行功率放大之后作用到电子膨胀阀的电机上使得电机转动一个微小角度(步骤309)。在步骤310,处理单元10再次控制驱动信号发生电路11输出第四持续预定时间的第四保持电流,经驱动电路12进行功率放大之后施加到电子膨胀阀的电机上,在电机的转子和定子之间产生磁场,利用该磁场产生的力矩对转子和定子之间的位置进行二次定位。在步骤311,处理单元10将期望阀体开度脉冲数存储到存储器中作为当前阀体开度脉冲数,流程结束于步骤312。
该实施例中,第一至第四持续时间可以相同,也可以不同,但均至少为50毫秒。作为选择,第一至第四持续时间中的每一个可以是60毫秒,70毫秒,80毫秒,90毫秒,100毫秒等。但是,为了不使电机过渡发热,第一至第四持续时间中的每一个最好不超过1秒。
该实施例中,第一预定脉冲数和第二预定脉冲数均为1个脉冲。
在该实施例中,不仅如图2所示实施例一样在启动电子膨胀之前对电子膨胀阀的电机进行二次定位以克服电机的启动转矩不足导致电子膨胀阀不能有效的驱动以及由于转子与定子相对位置的偏移导致启动失步的缺陷,还在给电子膨胀阀的电机施加转动脉冲数之后,再次对电子膨胀阀的电机进行二次定位,增强电机的力矩,以达到电机停止后电子膨胀阀不会由于冷媒压力变动等情况使电子膨胀阀的电机的转子产生位移。
图4示出了根据《电子膨胀阀的驱动控制装置及方法》的另一个实施例的电子膨胀阀的驱动控制方法的流程图。如图4所示,在步骤401,如步骤201一样,处理单元10接收电子膨胀阀的期望阀体开度信号,并从期望阀体开度信号获得期望阀体开度脉冲数。接下来,在步骤402,处理单元10从存储器中读取当前阀体开度脉冲数。处理单元10将期望阀体开度脉冲数与当前阀体开度脉冲数进行比较(步骤403),并且在二者不相同时,确定出需要使电子膨胀阀的电机转动的脉冲信号的转动脉冲数。如果期望阀体开度脉冲数与当前阀体开度脉冲数相同,则流程进行到步骤409。如果期望阀体开度脉冲数与当前阀体开度脉冲数不相同,处理单元10根据确定出的转动脉冲数,控制驱动信号发生电路11产生与转动脉冲数相应的转动脉冲信号,并输入到驱动电路12。转动脉冲信号经驱动电路12进行功率放大之后,施加到电子膨胀阀的电机上使电机转动与转动脉冲数相对应的角度(步骤404)。可选地,在步骤404之前,处理单元10控制驱动信号发生电路11输出第一预定持续时间的第一保持电流给驱动电路12,经驱动电路12进行功率放大之后施加到电子膨胀阀的电机上,在电机的转子和定子之间产生磁场,利用该磁场产生的力矩对转子和定子之间的位置进行一次定位。
在电子膨胀阀的电机转动与转动脉冲数相对应的角度之后,在步骤405,处理单元10控制驱动信号发生电路11输出第三预定持续时间的第三保持电流给驱动电路12,经驱动电路12进行功率放大之后施加到电子膨胀阀的电机上,在电机的转子和定子之间产生磁场,利用该磁场产生的力矩对转子和定子之间的位置进行一次定位。然后,驱动信号发生电路11在处理单元10的控制下输出第二预定脉冲数的附加脉冲信号,该附加脉冲信号经驱动电路12进行功率放大之后作用到电子膨胀阀的电机上使得电机转动一个微小角度(步骤406)。在步骤407,处理单元10再次控制驱动信号发生电路11输出第四持续预定时间的第四保持电流,经驱动电路12进行功率放大之后施加到电子膨胀阀的电机上,在电机的转子和定子之间产生磁场,利用该磁场产生的力矩对转子和定子之间的位置进行二次定位。在步骤408,处理单元10将期望阀体开度脉冲数存储到存储器中作为当前阀体开度脉冲数,流程结束于步骤409。
该实施例中,第一、第三和第四持续时间可以相同,也可以不同,但均至少为50毫秒。作为选择,第一、第三和第四持续时间中的每一个可以是60毫秒,70毫秒,80毫秒,90毫秒,100毫秒等。但是,为了不使电机过渡发热,第一、第三和第四持续时间中的每一个最好不超过1秒。
该实施例中,优选地,第二预定脉冲数为1个脉冲。
在该实施例中,在给电子膨胀阀的电机施加转动脉冲数之后,再次对电子膨胀阀的电机进行二次定位,增强电机的力矩,以达到电机停止后电子膨胀阀不会由于冷媒压力变动等情况使电子膨胀阀的电机的转子产生位移。而且,在给电子膨胀阀的电机施加转动脉冲数之前,第一持续时间的保持电流使得电机产生大的力矩克服阻力,也有助于电子膨胀阀的正确启动。

 电子膨胀阀控制设计
电子膨胀阀控制设计
 空调温控电子膨胀阀驱动电路的设计
空调温控电子膨胀阀驱动电路的设计