激光扫描仪
激光扫描仪是借着扫描技术来测量工件的尺寸及形状等工作的一种仪器,激光扫描仪必须采用一个稳定度及精度良好的旋转马达,当光束打 ( 射 ) 到由马达所带动的多面棱规反射而形成扫描光束。由于多面棱规位于扫描透镜的前焦面上,并均匀旋转使激光束对反射镜而言,其入射角相对地连续性改变,因而反射角也作连续性改变,经由扫描透镜的作用,形成一平行且连续由上而下的扫描线。
-

选择特殊符号
选择搜索类型
请输入搜索
激光扫描仪是借着扫描技术来测量工件的尺寸及形状等工作的一种仪器,激光扫描仪必须采用一个稳定度及精度良好的旋转马达,当光束打 ( 射 ) 到由马达所带动的多面棱规反射而形成扫描光束。由于多面棱规位于扫描透镜的前焦面上,并均匀旋转使激光束对反射镜而言,其入射角相对地连续性改变,因而反射角也作连续性改变,经由扫描透镜的作用,形成一平行且连续由上而下的扫描线。
1、零级精度200mm厚花岗石平台作机身,稳定不变形,精度持久保持。
2、采用1μm光学式电子尺做测量定位,全闭循环式运动控制,提高抄数机的定位精度。
3、采用线激光扫描,速度快,每秒2000-10000点。
4、双CCD取点,消除扫描死角。
5、开放式扫描设计,可扫描超大对象。
6、配送旋转台工件之立体、全方位扫描
ZLDS200激光扫描仪在工业生产在线检测产品时,利用这种非接触式而不需停机,甚至设有自动警报及回馈控制等功能。测量范围从0.25 mm~457 mm之间,精度可达3μm 。可以广泛应用在铁路铁轨、汽车制造、精密机械零件、电子元件的检测工艺中。
由于扫描法系以时间为计算基准,故又称为时间法。它是一种十分准确、快速且操作简单的仪器,且可装置于生产在线,形成边生产边检验的仪器。激光扫描仪的基本结构包含有激光光源及扫描器、受光感 ( 检 ) 测器、控制单元等部分。激光光源为密闭式,较不易受环境的影响,且容易形成光束,常采用低功率的可见光激光,如氦氖激光、半导体激光等,而扫描器为旋转多面棱规或双面镜,当光束射入扫描器后,即快速转动使激光光反射成一个扫描光束。光束扫描全程中,若有工件即挡住光线,因此可以测知直径大小。测量前,必须先用两支已知尺寸的量规作校正,然后所有测量尺寸若介于此两量规间,可以经电子信号处理后,即可得到待测尺寸。因此,又称为激光测规。
激光扫描仪价格在:700元到3000元之间; 激光扫描仪是借着扫描技术来测量工件的尺寸及形状等工作的一种仪器,激光扫描仪必须采用一个稳定度及精度良好的旋转马达,当光束打 ( &...
网上有很多价格信息,我归下类: 100万左右的,较大型进口三维扫描仪,一般为激光测绘或... 国内的便携式,手持式三维扫描仪 5...
主要型号 | LSH400 LSH600 LSH800 |
测量行程(mm) | 400x300x300x360° 600x500x400x360° 800x600x400x360° |
扫描测量精度 | ±0.01 mm/±0.05mm |
机台定位精度 | ±0.005mm |
软件 | Scan 3D Now |
档输出格式 | STL、OBJ、IGES、DXF、VRML |
扫描方式 | 平面扫描、旋转扫描、2相位扫描、混合扫描 |
量测景深 | 150mm/30mm |
机台结构 | 采用零级精度200mm厚花岗岩平台作机身基础 |
CCD传感器 | 2组 |
四轴扫描 | 360度旋转,一次定位量取全部点数据,自动将所有数据结合同一坐标系统。 |
使用环境 | 电源供给:110V~220V±10% 50/60HZ 温度:20±5℃ 湿度:45%-75% |
保修期 | 1年 |

 三维激光扫描仪在地形测量中的应用
三维激光扫描仪在地形测量中的应用
三维激光扫描仪在地形测量中的应用
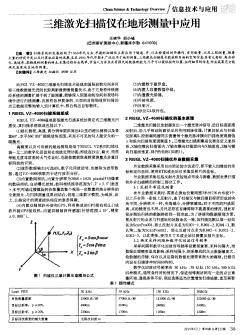
随着现代科技的高速发展,数字测图的方式也在不断地更新换代,其中最具有代表性的就是三维激光扫描仪与全球定位系统(GPS)的完美结合,不仅取代了传统测绘方法的测时较长、劳动强度高等缺点,而且还能高效快捷的获取数据,具有容并性、灵活性、智能性等强大的优势。从各个方面介绍了三维激光扫描仪系统,包括测量原理、应用现状以及其在地形测量中的应用过程,并且与传统的测量方式进行了比较,综合结果表明,三维激光扫描仪能够完美的取而代之,提高了测量数据的准确性,确保了测量作业能够高质量的完成。
 三维激光扫描仪在地形测量中应用
三维激光扫描仪在地形测量中应用
三维激光扫描仪在地形测量中应用
扫描系统的发展起始于1960年代左右,早期的扫描仪主要应用于隧道、井、以及桥梁的对齐操作、变形测量、以及工程测量。随着大量的研究开发以及计算机设备的发展,直至1990年代中期才广泛应用于地形测量。三维激光扫描技术能获取目标的空间信息,具有大面积、高自动化、高速率、高精度的测量的特点,采集过程安全简单、节省人力并且具有强大的数据理能力,几乎可以提供任何位置、任何细节的信息,作业成果完全能满足高寒地区地形测量。
内容包括地面激光扫描仪的分类与发展现状,地面激光扫描仪的测量原理,最新测距、测角原理,地面激光扫描仪的误差源,地面激光扫描仪各项误差的检定方法,地面激光扫描仪的整体检定方法,以及地面激光扫描仪的操作与应用举例等。
《地面激光扫描仪的测量原理及其检定》是作者在查阅国内外大量文献的基础上,结合最新研究成果编著而成,技术先进、内容丰富,资料翔实,可供涉及地面激光扫描仪生产、使用和检定的人员,以及相关专业的科研技术人员学习参考,也可作为测绘、工程应用领域的高校师生的教材和参考书。
在考古和文物保护中有很多应用,在指南针计划当中已经开始实施的项目当中被广泛应用,在镇国寺、双林寺、晋祠等项目中被采用的Surphaser三维激光扫描仪,在此次项目当中表现最佳。Surphaser 三维激光扫描仪是按照美国军方标准严格设计和生产的测绘产品,广泛用于工业测量、考古和文物保护、工程测绘和科学研究。从帕特农神庙的数字化保护到NASA空间站及飞行器的测量,Surphaser充分体现了快速、高精度的特点,是最新三维激光测量技术的体现。最高扫描速度(120万点每秒)与高精度(0.3毫米精度)和优秀扫描品质(0.07毫米噪音)的结合;涵盖从0.2米到140米的扫描范围;超低噪音数据和亚毫米的精度;高扫描密度,质量相当于100M像素数码照片;防尘防水设计,可轻松工作在室内或室外环境;高质量、精确的扫描数据可以导出为多种格式,用于常用点云后处理软件(Polyworks, RealWorks Survey, Leica Cyclone, Geomagic等)。

偏振光激光扫描仪GDx VCC采用的是一个固定的扫描环形区域,直径为3.2 mm,中心为视盘。它是一个高质量的精确聚焦的扫描,能在眼球轻微移动时仍有很好的对焦。软件根据定位、折射和眼部的调整自动给出l~10的定量分值,可以接受的图像质量为8分以上 。
正常厚度的RNFL的图像表现为上下方为明亮的黄色和红色(较厚),鼻侧颞侧为绿色和蓝色(较薄)。颞侧、上方、鼻侧、下方、颞侧(TSNIT)曲线图显示了计算环的RNFL厚度,表明正常值的范围。基本参数包括椭圆平均值(TSNIT average):椭圆测量环内所有像素的平均值;上方平均值(superi-or average):椭圆测量环内上方1200区域所有像素的平均值;下方平均值(inferior average):椭圆测量环内下方120。区域所有像素的平均值;TSNIT标准差(TSNIT standard deviation):某部位RNFL厚度值在正常人数据库中出现的概率,通常以4×4像素为单位;Inter-Eye双眼间对称性(symmetry);神经纤维指数(nerve fiber indicator,NFI)。并用色块来显示与正常眼数据的统计学差异旧 。
目前还没有普遍接受的对RNFL图像或延迟参数进行判断的标准,也尚未建立公认的异常扫描图定义。如果一幅GDx VCC扫描图的TSNIT平均、上方平均、下方平均、TSNIT标准差、双眼对称性和神经纤维指数(NFI)在P<0.01的水平,通常认为是异常的。现在认为GDx VCC扫描图的TSNIT平均、上方平均、下方平均、TSNIT标准差、双眼对称性和神经纤维指数(NFI)的P<0.05时为正常和异常的分界。曾有人建议把>47(P<0.01)或>30(P<0.05)作为NFI的上限 。
SLP发现存在RNFL改变的可能性包括:评估延迟值绝对值的改变、RNFL四象限厚度改变、RNFL厚度剖面改变、相对基值的RNFL厚度改变的色码图。但是与OCT一样,改变的可能性缺乏统计学意义,限制了区分测量可变性改变的能力,而且对这种运算法则尚未确认 。