选择特殊符号
选择搜索类型
请输入搜索

手臂一般有3个运动:伸缩、旋转和升降。实现旋转、升降运动是由横臂和产柱去完成。手臂的基本作用是将手爪移动到所需位置和承受爪抓取工件的最大重量,以及手臂本身的重量等。
手臂由以下几部分组成:
(1)运动元件。如油缸、气缸、齿条、凸轮等是驱动手臂运动的部件。
(2)导向装置。是保证手臂的正确方向及承受由于工件的重量所产生的弯曲和扭转的力矩。
(3)手臂。起着连接和承受外力的作用。手臂上的零部件,如油缸、导向杆、控制件等都安装在手臂上。
此外,根据机械手运动和工作的要求,如管路、冷却装置、行程定位装置和自动检测装置等,一般也都装在手臂上。所以手臂的结构、工作范围、承载能力和动作精度都直接影响机械手的工作性能。
水平多关节机械手臂一般有三个主自由度,Z1转动,Z2转动,Z移动。通过在执行终端加装X转动,Y转动可以到达空间内的任何坐标点。
直角坐标系机械手臂有三个主自由度。X移动,Y移动,Z移动组成,通过在执行终端加装X转动,Y转动,Z转动可以到达空间内的任何坐标点。
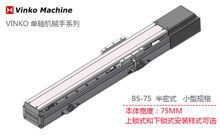
右图即为常见的构造形式之一,对于工业应用来说,有时并不需要机械手臂具有完整的六个自由度,而只需其中的一个或几个自由度。直角坐标系机械手臂可以由单轴机械手臂组合而成。单轴机械手臂作为一个组件在工业中应用广泛。下图为单轴机械手臂。单轴机械手臂的组件化大大降低了工业设计的成本,因专业制造商拥有良好的质量保证和批量生产的优势,使用组件比自行设计机械手臂更具优势。常见的直交机械手组合有悬臂式,龙门式,直立式,横立式等样式。
对于半导体制造应用来说,常用的机械手臂是用来搬送晶片,比如下图双臂型的机械手
机械手臂根据结构形式的不同分为多关节机械手臂,直角坐标系机械手臂,球坐标系机械手臂,极坐标机械手臂,柱坐标机械手臂等。右图为常见的六自由度机械手臂。他有X移动,Y移动,Z移动,X转动,Y转动,Z转动六个自由度组成。
机械手臂的好处:够接受指令,精确地定位到三维(或二维)空间上的某一点进行作业。基本介绍:机械手臂是机械人技术领域中得到最广泛实际应用的自动化机械装置,在工业制造、医学治疗、娱乐服务、军事、半导体制造以...
1、手臂应承载能力大、刚性好、自重轻手臂的刚性直接影响到手臂抓取工件时动作的平稳性、运动的速度和定位精度。如刚性差则会引起手臂在垂直平面内的弯曲变形和水平面内侧向扭转变形,手臂就要产生振动,或动作时工...
总的来说:材料要根据手臂的工作状况来选择,(因为你说的是机械手臂,手臂要完成各类已定,或将定的运动,既然要有这么个运动部件,所以它最好是选用轻型材料,此外需要从质量,刚度,惯性力等多角度综合考虑,这样...
1、手臂应承载能力大、刚性好、自重轻
手臂的刚性直接影响到手臂抓取工件时动作的平稳性、运动的速度和定位精度。如刚性差则会引起手臂在垂直平面内的弯曲变形和水平面内侧向扭转变形,手臂就要产生振动,或动作时工件卡死无法工作。为此,手臂一般都采用刚性较好的导向杆来加大手臂的刚度,各支承、连接件的刚性也要有一定的要求,以保证能承受所需要的驱动力。
2、手臂的运动速度要适当,惯性要小
机械手的运动速度一般是根据产品的生产节拍要求来决定的,但不宜盲目追求高速度。
手臂由静止状态达到正常的运动速度为启动,由常速减到停止不动为制动,速度的变化过程为速度特性曲线。
手臂自重轻,其启动和停止的平稳性就好。
3、手臂动作要灵活
手臂的结构要紧凑小巧,才能做手臂运动轻快、灵活。在运动臂上加装滚动轴承或采用滚珠导轨也能使手臂运动轻快、平稳。此外,对了悬臂式的机械手,还要考虑零件在手臂上布置,就是要计算手臂移动零件时的重量对回转、升降、支撑中心的偏重力矩。偏重力矩对手臂运动很不利,偏重力矩过大,会引起手臂的振动,在升降时还会发生一种沉头现象,还会影响运动的灵活性,严重时手臂与立柱会卡死。所以在设计手臂时要尽量使手臂重心通过回转中心,或离回转中心要尽量接近,以减少偏力矩。对于双臂同时操作的机械手,则应使两臂的布置尽量对称于中心,以达到平衡。
4、位置精度高
机械手要获得较高的位置精度,除采用先进的控制方法外,在结构上还注意以下几个问题:
(1)机械手的刚度、偏重力矩、惯性力及缓冲效果都直接影响手臂的位置精度。
(2)加设定位装置和行程检测机构。
(3)合理选择机械手的坐标形式。直角坐标式机械手的位置精度较高,其结构和运动都比较简单、误差也小。而回转运动产生的误差是放大时的尺寸误差,当转角位置一定时,手臂伸出越长,其误差越大;关节式机械手因其结构复杂,手端的定位由各部关节相互转角来确定,其误差是积累误差,因而精度较差,其位置精度也更难保证。
5、通用性强,能适应多种作业;工艺性好,便于维修调整
以上这几项要求,有时往往相互矛盾,刚性好、载重大,结构往往粗大、导向杆也多,增加手臂自重;转动惯量增加,冲击力就大,位置精度就低。因此,在设计手臂时,须根据机械手抓取重量、自由度数、工作范围、运动速度及机械手的整体布局和工作条件等各种因素综合考虑,以达到动作准确、可靠、灵活、结构紧凑、刚度大、自重小,从而保证一定的位置精度和适应快速动作。此外,对于热加工的机械手,还要考虑热辐射,手臂要较长,以远离热源,并须装有冷却装置。对于粉尘作业的机械手还要添装防尘设施。

该机械臂由用户的头脑完全控制,灵巧到足以拿起一个玻璃杯,在没有其他人帮助的情况下喝掉一杯饮料。这个机械臂的创造者一个研究小组,成员来自于加州理工学院等机构,其中,神经芯片被植入Sorto的大脑后顶叶皮层(PPC)。
该机器臂控制芯片植入位置与之前其他瘫痪用户控制机械臂的植入位置不同,通常情况下,这种控制芯片植入位置是控制肌肉的大脑区域,而PPC是控制我们行动意图的区域,移动,并让Erik Sorto控制的机械臂更加流畅和自然地运动。Erik Sorto要做的就是思考他打算做什么,并通过大量的练习,能够使机械臂进行他正在考虑的任务。
科学家已经研制出了橡胶机器手臂,可以抓起蚂蚁而不是捏死。目前这种机械手臂还处于研发阶段,科学家把电线浸入液体硅橡胶中,待凝固后抽出电线,得到一个长5-8mm,头发丝细的触手。触手内部分为许多小格子,通过压缩空气流动来做出各种动作,可以毫无伤害的握起蚂蚁的腰部。
科学家认为这种触手将来会大有用武之地,当然不是抓蚂蚁玩儿,而是进行诸如精密的心脏及胚胎血管手术。

 机械手臂
机械手臂
机械手臂
南京高等职业技术学校 毕业设计 (论文 )开题报告 学 生 姓 名: 杨兵 学 号: 31 专 业: 电气自动化 设计 (论文 )题目: PLC 模拟机械臂控制设备 指 导 教 师 : 韩邦涛 2011 年 5 月 3 日 毕 业 设 计(论 文)开 题 报 告 1.结合毕业设计(论文)课题情况,根据所查阅的文献资料,每人撰写 2000字左右的文献综述 文 献 综 述 机械臂是目前在机械人技术领域中得到最广泛实际应用的自动化 机械装置,在工业制造、医学治疗、娱乐服务、军事以及太空探索等 领域都能见到它的身影。尽管它们的形态各有不同,但它们都有一个 共同的特点,就是能够接受指令,精确地定位到三维(或二维)空间 上的某一点进行作业。 随着现代工业生产的迅速发展,机械手得以广泛的使用,它对稳 定、提高产品质量,提高生产效率,改善劳动条件和产品的快速快速 更新换代起着十分重要的作用。 PLC 控
 机械手臂结构优化设计
机械手臂结构优化设计
机械手臂结构优化设计
机械手臂结构优化设计
焊接机械手臂: 焊接机械手臂主要包括机械臂、焊机电源和控制柜三部分。(包括其控制系统)、送丝机(弧焊)、焊枪(钳)等部分组成。对于智能机器人还应有传感系统,如激光或摄像传感器及其控制装置等。
通过机械手臂可实现焊接自动化,提高生产率,降低企业成本。也能提高企业形象。
实现高效率焊接,需要两个前提:1.下料精度要,产品一致性高,才能更好的实现自动化焊接。
2.工件的装配精度要高,装配误差小于焊丝的直接。
与焊接相比,搬运要简单一些。搬运机械手臂只需要一个控制系统和机械臂本体,可实现自动化搬运。搬运的手爪需要根据搬运的产品定制。
机械手臂,美国最早运用在搬领域,可以大大减轻人的繁重体力劳动。广泛应用于机床上下料、冲压机自动化生产线、自动装配流水线、码垛搬运、集装箱等的自动搬运。
OTC机械手臂又称关节机器人,多数有6轴,6个关节可联动、也可以单个的运动、也可沿着X\Y\Z三个坐标方向移动,从而实现三维柔性工作。
