《基于伺服电机控制的多泵组合控制液压动力系统》是一种基于伺服电机控制的多泵组合控制液压动力系统,如图2所示,包括有主机控制器1、至少2个伺服泵(在该实施例有3个伺服泵)、油管10、油箱6,所有伺服泵的各支油管道汇接于一起构成系统的主油管道P0,在所有伺服泵(如图3所示)中有1个为主伺服泵21,主伺服泵21所在的油管道构成系统的主控支油管道P1,所有伺服泵所在的支油管道P1、P2、P3在进入系统主油管道P0之前分别串接有一个单向阀31、32、33,在该主伺服泵21上的单向阀31两端并联有主压力控制器,所述主压力控制器包括有插装阀4和压差节流孔5,所述插装阀4的进油腔A和控制腔X、压差节流孔5的两端分别并联在单向阀31的出油口和进油口两端,所述插装阀4的回油腔B通向油箱6。在该系统中所述的伺服泵包括有伺服电机驱动器211、伺服电机212、液压泵213、检测元件、制动电阻216,所述的检测元件包括有压力传感器215、编码器214,所述的液压泵213为齿轮泵或定量柱塞泵(与现有伺服泵结构基本相同)。《基于伺服电机控制的多泵组合控制液压动力系统》由多台伺服泵共同完成流量(速度)控制;而以单台伺服泵(主伺服泵21)的控制压力作为先导控制压力,与主压力控制器(液压插装阀4及压差节流孔5)共同组成压力闭环控制系统,实现对系统压力在加压、保压、减压或泄荷等不同工作过程的精确控制。其基本工作原理如图2所示:
系统在做流量(速度)控制时,该系统通过主机控制器1发送设定的相同流量指令给各伺服电机驱动器211,使各伺服电机212按设定的转速正向运转,从而驱动各伺服泵213从各自支油管道P1、P2、P3中经单向阀31、32、33的出油端输出指定流量(速度)的液压油,并通过各伺服泵的编码器214的检测反馈信号,闭环控制各个伺服电机212的转速,从而达到精确控制系统流量(速度)的目的。(这与现有的速度控制模式基本相同)。系统保压在做压力控制时,系统通过主机控制器1只给主伺服泵21发送压力指令,辅助伺服泵22、23不工作。这时在单向阀32和33的止回作用下,辅助伺服泵各支油路P2、P3与主油管道P0隔离,使系统压力只受主伺服泵21和主压力控制器的控制,主油管道P0中的油不会回流辅助伺服泵22、23,因而辅助伺服泵22、23避免了长时间负载运行而且大大减少了系统中液压油对伺服泵系统的冲击。主伺服泵21的伺服电机驱动器211在接到主机控制器1的指令后:如果此时指令压力大于实际系统压力(压力传感器的检测压力),那么通过控制主伺服泵21的伺服电机212输出较大扭矩,使主伺服泵21的液压泵213输出设定的指令压力,这时主伺服泵21的液压泵213出口的压力升高,压力油经压差节流孔5和单向阀31进入系统主油管道P0使系统压力升高至设定压力完成加压动作。在这过程前后,插装阀4控制腔X的压力高于进油腔A的压力,在压力油和弹簧力的作用下,插装阀4处于关闭状态。如果指令压力小于实际系统压力,主伺服泵21反向转动输出较小的扭矩,使主伺服泵21的液压泵213出口压力降低,此时主伺服泵21的液压泵213出口压力小于系统压力,压力油经压差节流孔5从主油管道P0流向主控支油管道P1,这时由于压差节流孔5的作用使主油管道P0与主伺服泵21的液压泵213出口的压力,在压差节流孔5两端产生了压力降,这时插装阀4进油腔A的压力高于控制腔X的压力,当插装阀4进油腔A的压力与控制腔X的压力差克服插装阀4主阀芯的弹簧力时,插装阀4打开,系统部分压力油从插装阀4的进油腔A经回油腔B流回油箱6,使系统压力降低至新的设定压力完成减压动作。在加压或减压的同时,压力传感器215的检测反馈信号修正系统压力指令,实现系统压力闭环控制。因此,主压力控制器(液压插装阀4及压差节流孔5)可以动态跟随主伺服泵的输出的先导控制压力(指令压力),从而实现对系统压力的数字比例闭环控制。
系统保压在做压力控制时,系统通过主机控制器1给各辅助伺服泵22、23的电机驱动器211发送停止工作指令,使各辅助伺服电机212停止运转,各辅助伺服泵22、23不工作;主机控制器1只给主伺服泵21发送压力指令由主伺服泵21完成保压动作。同样这时在单向阀32和33的止回作用下,各辅助伺服泵22、23的支油路P2、P3与主油管道P0隔离,辅助伺服泵泄荷,压力接近零,因而同样,辅助伺服泵22、23避免了长时间负载运行而且大大减少了系统中液压油对伺服泵系统的冲击。
保压完成后,系统泄荷时,同样系统通过主机控制器1给主伺服泵21发送零压力指令,其它辅助伺服泵22、23不工作,通过控制主伺服泵21的伺服电机212使主伺服泵21的液压泵213反向转动输出零压力完成先导泄荷,压差节流孔5前后的压力降控制插装阀4主阀芯的完全打开,于是,系统大流量的压力油从插装阀4的进油腔A经回油腔B流回油箱6,使系统在极短时间内完成泄荷动作,从而避免了泄荷对各伺服泵的冲击。
在该系统的控制下,根据实际需要可实循环实现以上加压、保压、减压或泄荷的工作过程。在该实施例中,辅助伺服泵有两个,在实际应用时可以根据流量需要求来设置辅助伺服泵的数量。
由于在该系统中所有伺服泵所在的支油管道在进入系统主油管道P0之前都串接有一个单向阀(如图2所示),因而避免了多台伺服泵长时间负载运行,从而对伺服泵的过载能力起到了很大的保护作用。又因为系统中设有主压力控制器且采用大通径的插装阀4作为主压力阀来完成降压和泄荷,因此,泄压快,噪音低,加上各单向阀的止回作用因而系统中液压油对伺服泵系统的冲击小,这样便延长了伺服泵的使用寿命。又因为该系统采用的是液电联合控制降压或泄荷的控制方式,只需要单台小排量伺服泵(主伺服泵21)就可以完成保压和泄荷动作,此时其它伺服泵(辅助伺服泵22、23)处于空载状态,这样便大大地降低了系统的能量消耗,又避免了只能通过所有伺服泵同步动作才能实现对系统的压力控制,又可以避免各辅助伺服泵22、23工作在低速大扭矩(保压)运行状态,降低了各辅助伺服泵22、23的伺服电机212和伺服电机驱动器211的配置要求,从而节约了资源和生产成本,提高产品竞争力。这对于大吨位注塑机成型的大质量注塑件需要长时间保压具有重要意义。另外由于该系统不需要所有伺服泵同步动作才能实现系统的压力控制因而不需要专门的伺服电机联立控制器,从而降低了采购成本,加上由于单向阀31的止回作用伺服电机212反向制动的负载大大降低,也减少了制动电阻216的配置功率。
《基于伺服电机控制的多泵组合控制液压动力系统》的液压控制部分还可以采用不同的结构和连接方式实现。
如图3、4、5、6所示的实施例二、三、四、五是该系统的具有相同控制原理的几种变化的结构和连接方式,这些实施例的区别主要是在主压力控制器处。
如图3所示的实施例二是对实施例一的进一步改进,在该系统的主油管道P0上设有安全阀7,该安全阀7的出油口通向油箱6。该实施例复合了安全压力控制功能后的控制原理,在系统的主油管道P0上设有安全阀7,当系统的压力超过系统压力安全值时,这时安全阀7打开,油力油经安全阀7出油口流进油箱6,从而限定系统的最大安全压力。
如图5所示的实施例四也是对实施例一的进一步改进,所述插装阀4的控制腔X连接有先导安全阀9,所述先导安全阀9的进油端与插装阀4控制腔X汇交并连通主控支油管道P1,所述先导安全阀9的出油端通向油箱6;在所述先导安全阀9的进油端与插装阀4控制腔X汇交后与单向阀31的进油端之间设置有先导节流孔8。这也是复合了安全压力控制功能后的控制原理,当系统压力达到先导安全阀9的设定压力时,先导安全阀9打开,压力油经先导节流孔8向先导安全阀9流动从而产生压力降,这时插装阀4进油腔A的压力高于插装阀4控制腔X的压力,当插装阀4进油腔A的压力与控制腔X的压力差克服插装阀4主阀芯的弹簧力时,插装阀4打开,从而限定系统的最大安全压力。
在以上所述的如图2、3、5所示实施例一、二、四中,所述压差节流孔5也可开设在该插装阀4的主阀芯中,这时插装阀4的控制腔X通过压差节流孔5和插装阀4进油腔A连通。如图4、6所示的实施例三、五分别是把如图3、5所示的实施例二、四中的压差节流孔5开设在该插装阀4的主阀芯中的情况,它们对应具有相同的控制原理和功能。
该系统除适用于任意多组伺服泵的控制要求外,还可以用在伺服电机驱动大、小双排量柱塞泵的泄荷回路。
该系统不局限用于注塑机,也可用于需要实现相同控制原理和功能的其它领域。

 直流伺服电机控制系统设计综述
直流伺服电机控制系统设计综述
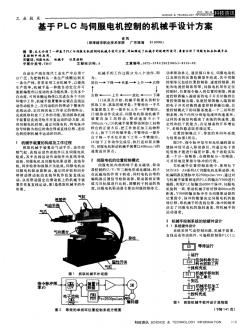 基于PLC与伺服电机控制的机械手设计方案
基于PLC与伺服电机控制的机械手设计方案