目录
第1章 盾构法隧道施工概述 1
1.1 盾构法隧道发展背景 1
1.1.1 我国盾构法隧道发展 1
1.1.2 盾构法隧道施工原理 2
1.1.3 盾构法隧道工法特点 5
1.2 盾构法隧道施工方法 6
1.2.1 盾构机的基本功能 7
1.2.2 盾构施工流程 11
1.3 盾构施工与周边环境的相互作用 16
1.3.1 隧道施工对周边环境的影响 16
1.3.2 周边环境对盾构施工的约束 18
1.4 盾构法隧道施工控制技术 19
1.4.1 地面沉降控制 19
1.4.2 隧道轴线控制 19
1.4.3 特殊区段控制 21
1.5 本章 小结 22
参考文献 23
第2章 地下工程的岩土介质 24
2.1 岩土介质概述 24
2.1.1 土的生成与特性 25
2.1.2 土的组分构造 27
2.1.3 土的物性指标 32
2.1.4 岩土的工程分类 37
2.2 地下水和渗流 40
2.2.1 地下水概述 40
2.2.2 土的渗透性 41
2.2.3 地下水的渗流规律 43
2.2.4 地下水与隧道施工 45
2.3 土中应力计算 47
2.3.1 土中应力计算 47
2.3.2 有效应力原理 54
2.3.3 土的应力路径 56
2.3.4 土的侧向压力 58
2.4 土的强度 63
2.4.1 土的强度及其测定 63
2.4.2 土的破坏准则 67
2.4.3 黏性土的抗拉强度 70
2.5 土的固结和沉降 72
2.5.1 土的压缩性 72
2.5.2 地基沉降的计算 76
2.5.3 渗流固结 77
2.5.4 隧道的地面沉降 80
2.6 本章 小结 81
参考文献 82
第3章 地下工程的力学方法 84
3.1 岩土介质的本构关系 84
3.1.1 土的应力应变特性 85
3.1.2 弹性本构关系 87
3.1.3 塑性和弹塑性本构关系 90
3.1.4 黏弹性和黏弹塑性本构关系 96
3.1.5 损伤本构理论 99
3.1.6 岩土本构关系 102
3.2 解析方法 102
3.2.1 解析方法的控制方程 102
3.2.2 隧道开挖应力与位移解析解 103
3.2.3 隧道开挖引起地画沉降的解析解 107
3.2.4 解析法的应用 109
3.3 数值方法 111
3.3.1 有限元方法 111
3.3.2 有限差分法 113
3.3.3 离散元方法 115
3.3.4 其他数值计算方法 117
3.3.5 数值分析方法的应用 118
3.4 经验公式 122
3.4.1 Peck公式 122
3.4.2 Peck公式的发展 125
3.4.3 经验公式的隧道应用案例 127
3.5 试验方法 131
3.5.1 室内试验 131
3.5.2 现场试验 139
3.6 本章 小结 143
参考文献 144
第4章 盾构施工的力学分析 147
4.1 盾构施工的力学过程 147
4.1.1 刀盘前方土的开挖与支护 148
4.1.2 盾尾建筑空隙形成与填充 149
4.1.3 周围地层的固结重塑 150
4.2 盾构开挖面的稳定分析 150
4.2.1 开挖面稳定的力学原理 151
4.2.2 开挖面稳定的影响因素 152
4.2.3 开挖面稳定的研究现状 156
4.2.4 开挖面稳定的研究难点 157
4.3 盾尾建筑空隙的注浆填充 158
4.3.1 注浆填充的施工原理 158
4.3.2 注浆填充的影响因素 159
4.3.3 注浆填充的研究现状 161
4.3.4 注浆填充的研究难点 163
4.4 隧道周围土的重塑 166
4.4.1 土体重塑的为学原理 167
4.4.2 土体重塑的影响因素 167
4.4.3 土体重塑的研究现状 168
4.4.4 土体重塑的研究难点 169
4.5 本章 小结 171
参考文献 171
第5章 盾构法施工信息技术 173
5.1 盾构法施工的信息论基础 173
5.1.1 盾构法隧道施工信息的作用 173
5.1.2 盾构法隧道施工的信息研究 174
5.2 盾构机掘进信息的采集 175
5.2.1 盾构机掘进信息的内容 175
5.2.2 盾构开挖信息采集 175
5.2.3 盾构及管片姿态信息的采集 176
5.3 隧道及周边监测信息的采集 183
5.3.1 隧道及周边监测信息的内容 184
5.3.2 隧道及周边监测的常用手段 184
5.3.3 隧道及周边监测信息的采集 188
5.4 盾构施工的信息存储 194
5.4.1 盾构施工信息的特征 194
5.4.2 盾构施工信息的标准化 196
5.4.3 盾构施工管理数据库的设计 198
5.5 盾构法隧道施工的信息处理 199
5.5.1 盾构施工信息的统计 199
5.5.2 盾构施工信息的查询 199
5.5.3 盾构施工信息可视化 200
5.6 本章 小结 203
参考文献 203
第6章 地下工程控制论原理 204
6.1 地下工程控制论思想 204
6.1.1 地下工程的研究对象 204
6.1.2 地下工程的基本特点 206
6.1.3 地下工程的基本公设 208
6.1.4 地下工程的三种状态 209
6.1.5 地下工程中的控制论 210
6.1.6 地下工程的可观测性和能控制性 211
6.2 地下工程控制系统 213
6.2.1 控制系统的结构 214
6.2.2 控制系统的难点 215
6.3 地下工程的控制原则和手段 216
6.3.1 降低对岩土介质的扰动 216
6.3.2 提高岩土介质的稳定性 217
6.3.3 地下工程系统控制策略 217
6.4 本章 小结 219
参考文献 220
第7章 盾构施工过程的控制 221
7.1 盾构法隧道施工系统 221
7.1.1 施工系统的框架 221
7.1.2 施工系统信息流 223
7.1.3 施工系统的辨识 225
7.1.4 盾构法控制问题 226
7.2 土体强度的控制 227
7.2.1 土体强度控制原理 227
7.2.2 土体强度控制系统 228
7.2.3 土体强度控制策略 229
7.3 开挖面稳定控制问题 229
7.3.1 开挖面的控制原理 230
7.3.2 开挖面的控制系统 231
7.3.3 开挖面的控制策略 233
7.4 盾构尾部区域控制 235
7.4.1 注浆控制原理 236
7.4.2 注浆控制系统 237
7.4.3 注浆控制策略 238
7.5 盾构推进方向控制 239
7.5.1 推进方向的控制原理 239
7.5.2 盾构机轴线控制系统 241
7.5.3 方向和轴线控制策略 241
7.6 本章 小结 242
参考文献 243
第8章 盾构施工的智能控制 244
8.1 控制论与智能控制 244
8.1.1 控制论发展历程 244
8.1.2 智能控制思想和特点 246
8.2 专家系统和专家控制系统 247
8.2.1 基本原理 247
8.2.2 基于专家系统的周边环境预测控制 249
8.2.3 基于专家控制系统的盾构推进系统 253
8.2.4 应用和发展趋势 254
8.3 人工神经网络 256
8.3.1 基本原理 256
8.3.2 基于神经网络的地层变形预测 261
8.3.3 基于神经网络的盾构密封舱压力控制 264
8.3.4 应用与发展趋势 265
8.4 模糊控制 266
8.4.1 基本原理 266
8.4.2 盾构姿态的模糊控制 274
8.4.3 地面沉降的模糊控制 276
8.4.4 模糊控制应用和发展的趋势 278
8.5 遗传算法 279
8.5.1 基本原理 279
8.5.2 基于遗传算法的设定值优化 281
8.5.3 基于遗传算法的控制系统模型参数优化 283
8.5.4 遗传算法的应用与发展趋势 285
8.6 本章 小结 285
参考文献 286
第9章 盾构控制技术的发展 288
9.1 多层次盾构工程施工数据库 288
9.1.1 异构数据的集成原理 289
9.1.2 异构数据集成的关键技术 290
9.1.3 基于中间件数据库系统设计 292
9.1.4 隧道工程和试验联合数据库 293
9.2 智能控制算法发展与应用 294
9.2.1 基于基因表达式双圆盾构沉降研究 294
9.2.2 基于免疫多模型盾构推进控制研究 300
9.3 盾构机全自动控制技术发展 308
9.3.1 管片自动选型和拼装技术 309
9.3.2 盾构位姿的自动检测和控制 317
9.4 本章 小结 322
参考文献 322
第10章 力学和控制论的运用 324
10.1 力学和控制论的适用性分析 324
10.2 力学在盾构隧道施工中的运用 325
10.2.1 力学理论对盾构施工控制参数的指导 324
10.2.2 盾构隧道施工对地层的力学影响分析及应用 330
10.2.3 盾构近距离穿越建(构)筑物的力学分析及应用 333
10.3 控制论在盾构隧道施工中的运用 341
10.3.1 同步注浆控制系统功能介绍及系统实例 342
10.3.2 盾构隧道轴线控制系统功能介绍及系统实例 346
10.3.3 设备故障诊断系统功能介绍及系统实例 348
10.3.4 隧道工程智能控制系统及其应用 349
10.3.5 风险控制系统在盾构隧道施工中的应用 352
10.4 盾构隧道施工中的灾害防治 357
10.4.1 盾构隧道工程灾害分类 357
10.4.2 盾构穿越特殊地质水文条件的处理措施 358
10.4.3 盾构隧道施工灾害及应急处理 365
10.5 展望 374
10.5.1 力学和控制论的结合性发展和应用 374
10.5.2 对盾构法隧道工程灾害及其防治的再认识 375
10.5.3 盾构法隧道工程控制系统的全生命周期管理 376
参考文献 377
索引 379 2100433B

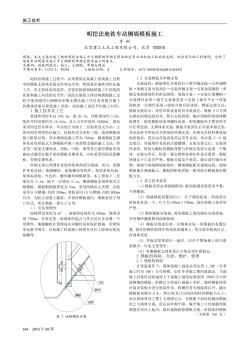 明挖法地铁车站侧墙模板施工
明挖法地铁车站侧墙模板施工
 明挖法地铁车站的施工部署与施工工艺
明挖法地铁车站的施工部署与施工工艺