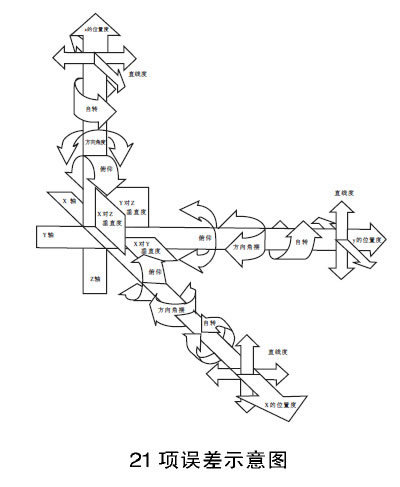
21项误差
21项误差最早来源于三坐标测量机,现在也运用于数控加工中心。通常将三坐标测量机或三轴加工中心的几何参数误差按其在各运动自由度方向作用分类,分为三项位置度、六项直线度、九项角摆误差、以及三轴相互之间的三项垂直度,共二十一项参数误差。 二十一项误差是三坐标测量机的基本几何误差,为了保证三坐标测量机满足示值误差及探测误差的要求,三坐标测量机生产厂家都要测量和控制这二十一项误差,必要时进行补偿。 二十一项误差的测量可以使用不同的测量仪器进行检测以便于修正,包括双频激光干涉仪、电子水平仪、直角尺、高精度电感测微仪,但是,需要注意的是,使用上述仪器测量参数误差时,测量结果可能是几种参数误差的综合结果。
-