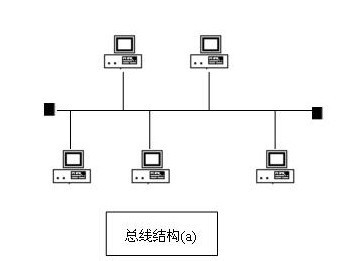
总线结构
这种网络拓扑结构中所有设备都直接与总线相连,它所采用的介质一般也是同轴电缆(包括粗缆和细缆),不过现在也有采用光缆作为总线型传输介质的,如后面我们将要讲的ATM网、Cable Modem所采用的网络等都属于总线型网络结构。
-
选择特殊符号
选择搜索类型
请输入搜索
这种网络拓扑结构中所有设备都直接与总线相连,它所采用的介质一般也是同轴电缆(包括粗缆和细缆),不过现在也有采用光缆作为总线型传输介质的,如后面我们将要讲的ATM网、Cable Modem所采用的网络等都属于总线型网络结构。
(1)组网费用低:从示意图可以看到这样的结构根本不需要另外的互联设备,是直接通过一条总线进行连接,所以组网费用较低;
(2)这种网络因为各节点是共用总线带宽的,所以在传输速度上会随着接入网络的用户的增多而下降;
(3)网络用户扩展较灵活:需要扩展用户时只需要添加一个接线器即可,但所能连接的用户数量有限;
(4)维护较容易:单个节点失效不影响整个网络的正常通信。但是如果总线一断,则整个网络或者相应主干网段就断了。
所有的数据都需经过总线传送,总线若出现故障则整个网络就会瘫痪。而且一次仅能一个端用户发送数据,其它端用户必须等待到获得发送权。
在EAI中和星型结构相对。
这种网络拓扑结构中所有设备都直接与总线相连,它所采用的介质一般也是同轴电缆(包括粗缆和细缆),不过现在也有采用光缆作为总线型传输介质的,如后面我们将要讲的ATM网、Cable Modem所采用的网络等都属于总线型网络结构。
DSP芯片TMS320F2812 DSP片外扩展 64K * 16位SRAM(基本配置),最大可扩展到512K * 16位。内部RAM不够用时,用来扩充内存,当然是并行的。
总线制是2根线控制很多根,多线制是每个控制点都有单独的线
串行就是数据一位一位传输的,数据线只需要一根(如果支持双向需要2根),并行就是数据多位同时传输(4位,8位,甚至64位,128位),当然效率是并行很高,但是如果远距离传输的话串行成本低。所以,一般设备...

 基于主从式总线结构的转矩流变仪现场控制器的设计
基于主从式总线结构的转矩流变仪现场控制器的设计
基于主从式总线结构的转矩流变仪现场控制器的设计
在基于计算机测控技术的转矩流变仪系统的基础上,介绍基于主从式总线结构的转矩流变仪现场控制器以完善系统的性能.采用了模块化设计和主从式的结构,进行了测控电路模块设计,使得系统性能的灵活性和可靠性有了很大的提高.
现场总线简介及总线电缆的设计
现场总线简介及总线电缆的设计
本文主要介绍了目前工业自动化控制系统中广泛使用的几种现场总线及其总线电缆的特点,并以基金会现场总线FF-H1(低速)和Profibus PA总线电缆为例,探讨了现场总线电缆的设计。
KNX总线协议遵循OSI模型协议规范,并进行了合理的简化。由物理层、数据链接层、网络层、传输层和应用层组成,会话层和表示层的功能则并入应用层与传输层。
每一层的协议规范中都明确的规定了信号在不同层中的表达和传输。
物理层主要控制和实现比特流在介质中的传输,涉及到通信信号在信道上的原始比特流。主要包括处理机械、电气和过程的接口以及物理层下的物理传输介质等。物理层主要有两部份组成同时使用CSMA/CA机制(具有避免冲突的载波侦听多路访问),一个是物理层逻辑单元(LU)另一个是介质附加单元(MAU)。
链接层同样遵循OSI规范协议,主要由介质访问控制(MAC)与逻辑连接控制(LLC)组成。数据链接层的主要任务是为同一子网中的两个设备提供可靠的单帧传输。
网络层
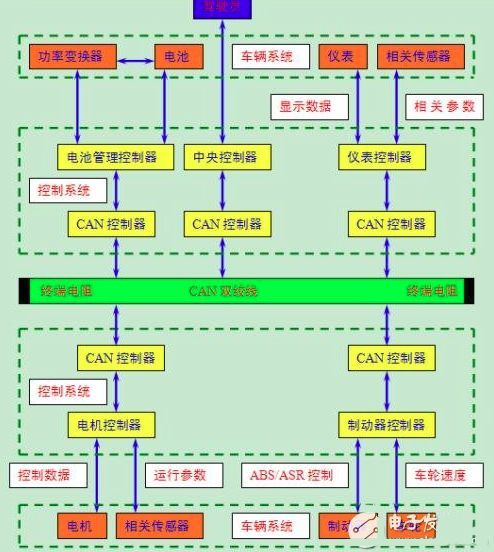
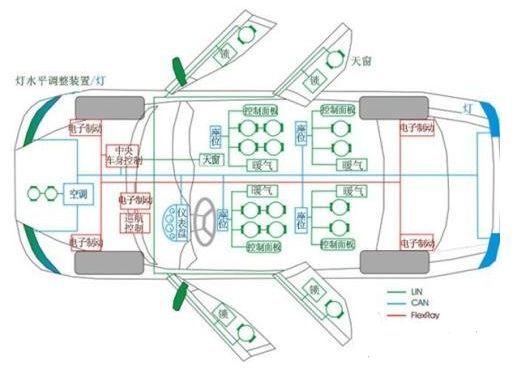
控制器局域网总线(CAN,Controller Area Network)是一种用于实时应用的串行通讯协议总线,它可以使用双绞线来传输信号,是世界上应用最广泛的现场总线之一。CAN协议用于汽车中各种不同元件之间的通信,以此取代昂贵而笨重的配电线束。该协议的健壮性使其用途延伸到其他自动化和工业应用。CAN协议的特性包括完整性的串行数据通讯、提供实时支持、传输速率高达1Mb/s、同时具有11位的寻址以及检错能力。
CAN系统组成
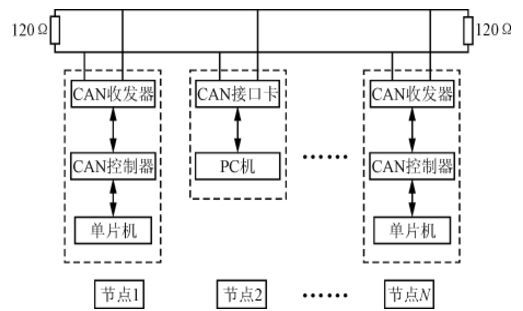
CAN总线用户接口简单,编程方便。网络拓扑结构采用总线式结构。这种网络结构简单、成本低,并且采用无源抽头连接,系统可靠性高。通过CAN总线连接各个网络节点,形成多主机控制器局域网(CAN)。信息的传输采用CAN通信协议,通过CAN控制器来完成。各网络节点一般为带有微控制器的智能节点完成现场的数据采集和基于CAN协议的数据传输,节点可以使用带有在片CAN控制器的微控制器,或选用一般的微控制器加上独立的CAN控制器来完成节点功能。传输介质可采用双绞线、同轴电缆或光纤。如果需要进一步提高系统的抗干扰能力,还可以在控制器和传输介质之间加接光电隔离,电源采用DC-DC变换器等措施。这样可方便构成实时分布式测控系统。微控制器,或选用一般的微控制器加上独立的CAN控制器来完成节点功能。传输介质可采用双绞线、同轴电缆或光纤。如果需要进一步提高系统的抗干扰能力,还可以在控制器和传输介质之间加接光电隔离,电源采用DC-DC变换器等措施。这样可方便构成实时分布式测控系统。
CAN总线的物理接口
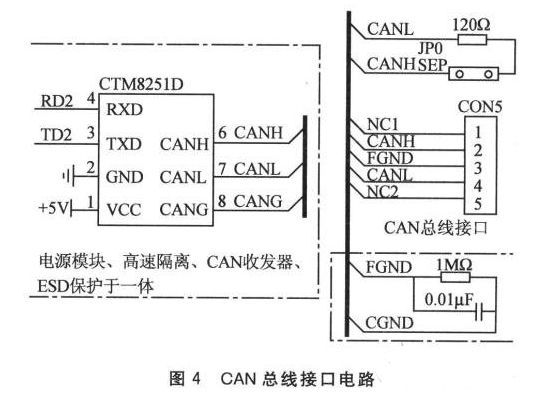
采用CAN收发器PCA82C250作为CAN控制器和物理总线之间的接口,提供向总线的差动发送能力和对CAN控制器的差动接收能力。
一般在驱动芯片和CAN控制器之间加入光电耦合器,增加抗干扰能力。CAN总线的速度将由光电耦合器的速度决定。比如:用4N27光耦,因为它的响应速度比较慢,CAN网络的位速度只能达到几十Kbit/s。如果采用6N137高速光电耦合器,CAN网络速度可以达到和电阻网络驱动时的速度一样。另外,物理层的设计要注意电缆的终端阻抗匹配,这直接影响了CAN总线能否正常工作和网络性能,一般在CAN总线两端并联120Ω的电阻。
CAN总线的工作原理
CAN总线使用串行数据传输方式,可以1Mb/s的速率在40m的双绞线上运行,也可以使用光缆连接,而且在这种总线上总线协议支持多主控制器。 CAN与I2C总线的许多细节很类似,但也有一些明显的区别。
当CAN总线上的一个节点(站)发送数据时,它以报文形式广播给网络中所有节点。对每个节点来说,无论数据是否是发给自己的,都对其进行接收。每组报文开头的11位字符为标识符,定义了报文的优先级,这种报文格式称为面向内容的编址方案。在同一系统中标识符是唯一的,不可能有两个站发送具有相同标识符的报文。当几个站同时竞争总线读取时,这种配置十分重要。
当一个站要向其它站发送数据时,该站的CPU将要发送的数据和自己的标识符传送给本站的CAN芯片,并处于准备状态;当它收到总线分配时,转为发送报文状态。CAN芯片将数据根据协议组织成一定的报文格式发出,这时网上的其它站处于接收状态。每个处于接收状态的站对接收到的报文进行检测,判断这些报文是否是发给自己的,以确定是否接收它。
由于CAN总线是一种面向内容的编址方案,因此很容易建立高水准的控制系统并灵活地进行配置。我们可以很容易地在CAN总线中加进一些新站而无需在硬件或软件上进行修改。当所提供的新站是纯数据接收设备时,数据传输协议不要求独立的部分有物理目的地址。它允许分布过程同步化,即总线上控制器需要测量数据时,可由网上获得,而无须每个控制器都有自己独立的传感器。
CAN总线的特点
(1)具有实时性强、传输距离较远、抗电磁干扰能力强、成本低等优点;
(2)采用双线串行通信方式,检错能力强,可在高噪声干扰环境中工作;
(3)具有优先权和仲裁功能,多个控制模块通过CAN 控制器挂到CAN-bus 上,形成多主机局部网络;
(4)可根据报文的ID决定接收或屏蔽该报文;
(5)可靠的错误处理和检错机制;
(6)发送的信息遭到破坏后,可自动重发
;
(7)节点在错误严重的情况下具有自动退出总线的功能;
(8)报文不包含源地址或目标地址,仅用标志符来指示功能信息、优先级信息。
随着WS信号的改变,导出一个WSP脉冲信号,进入并行移位寄存器,从而输出数据被激活。串行数据的默认输入是0,因此所有位于最低位(LSB)后的数据将被设置为0。
随着第一个WS信号的改变,WSP在SCK信号的下降沿重设计数器。在"1 out of n"译码器对计数器数值进行译码后,第一个串行的数据(MSB)在SCK时钟信号的上升沿被存放进入B1,随着计数器的增长,接下来的数据被依次存放进入B2到Bn中。在下一个WS信号改变的时候,数据根据WSP脉冲的变化被存放进入左(声道)锁存器或者右(声道)锁存器,并且将B2一Bn的数据清除以及计数器重设,如果有冗余的数据则最低位之后的数据将被忽略。注意:译码器和计数器(虚线内的部分)可以被一个n比特移位寄存器所代替。
IIS总线接口可作为一个编码解码接口与外部8/16位的立体声音频解码电路(CODEC IC)相连,从而实现微唱片和便携式应用。它支持IIS数据格式和MSB-Justified 数据格式。IIS总线接口为先进先出队列FIFO的访问提供DMA传输模式来取代中断模式,可同时发送和接收数据,也可只发送或接收数据。