GPS多通道接收机概述文献

 GPS接收机检验
GPS接收机检验
GPS接收机检验
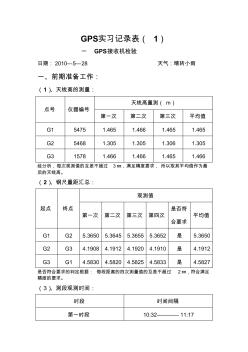
GPS实习记录表( 1) 一 GPS接收机检验 日期: 2010—5—28 天气:晴转小雨 一、前期准备工作: (1)、天线高的测量: 点号 仪器编号 天线高量测( m) 第一次 第二次 第三次 平均值 G1 5475 1.465 1.466 1.465 1.465 G2 5468 1.305 1.305 1.306 1.305 G3 1578 1.466 1.466 1.465 1.466 经分析,每次观测值的互差不超过 3㎜,满足精度要求, 所以取其平均值作为最 后的天线高。 (2)、钢尺量距汇总: 起点 终点 观测值 第一次 第二次 第三次 第四次 是否符 合要求 平均值 G1 G2 5.3650 5.3645 5.3655 5.3652 是 5.3650 G2 G3 4.1908 4.1912 4.1920 4.1910 是 4.1912 G3 G1 4.5830 4.5
 GPS接收机常规检验记录
GPS接收机常规检验记录
GPS接收机常规检验记录
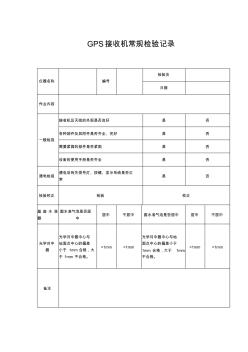
GPS接收机常规检验记录 仪器名称 编号 检验员 日期 作业内容 一般检视 接收机及天线的外观是否良好 是 否 各种部件及其附件是否齐全、完好 是 否 需要紧固的部件是否紧固 是 否 设备的使用手册是否齐全 是 否 通电检视 通电后有关信号灯、按键、显示系统是否正 常 是 否 检验校正 检验 校正 基 座 水 准 器 圆水准气泡是否居 中 居中 不居中 圆水准气泡是否居中 居中 不居中 光学对中 器 光学对中器中心与 地面点中心的偏差 小于 1mm 合格,大 于 1mm 不合格。 <1mm >1mm 光学对中器中心与地 面点中心的偏差小于 1mm 合格,大于 1mm 不合格。 <1mm >1mm 备注
