PWM直流电机文献

 直流电机
直流电机
直流电机
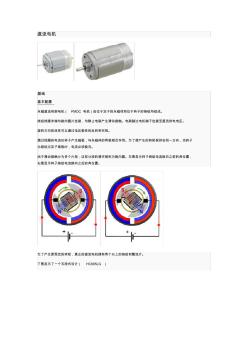
直流电机 基础 基本配置 永磁直流有刷电机( PMDC 电机)由位于定子的永磁体和位于转子的绕组所组成。 绕组线圈末端与换向器片连接,与静止电刷产生滑动接触。电刷越过电机端子连接至直流供电电压。 旋转方向的改变可以通过电压极性的反转来实现。 通过线圈的电流在转子产生磁极,与永磁体的两极相互作用。为了使产生的转矩保持在同一方向,当转子 北极经过定子南极时,电流必须换向。 由于滑动接触分为多个片段,这些分段的滑环被称为换向器。左图显示转子绕组电流换向之前的角位置, 右图显示转子绕组电流换向之后的角位置。 为了产生更恒定的转矩,真正的直流电机拥有两个以上的绕组和整流片。 下图显示了一个五段式设计( HC685LG ) 永磁材料由弹簧固定( NF213G ) 这是规格为 #200 的 JE 永磁直流电机的分解图。 换向器 片是由铜做成的。上面这种电机有 3 个片段。 电刷是由贵金属(金属指型叶片电