半导体机械手文献

 半导体特性
半导体特性
半导体特性
实用标准文案 精彩文档 建 平 县 职 业 教 育 中 心 备 课 教 案 课 题 模块(单元)第一章 项目(课) 半导体的主要特征 授课班级 11电子 授课教师 安森 授课类型 新授 授课时数 2 教学目标 知识目标 描述半导体的主要特征 能力目标 能够知道 P型半导体和 N型半导体的特点 情感态度目标 培养学生的学习兴趣,培养学生的爱岗敬业精神 教学核心 教学重点 半导体的主要特征 教学难点 P型半导体和 N型半导体的特点 思路概述 先讲解半导体的特点,再讲 P型半导体和 N型半导体的特点 教学方法 读书指导法、演示法。 教学工具 电脑,投影仪 教 学 过 程 一、组织教学:师生互相问候,安全教育,上实训课时一定要听从老师的指挥,在实训室不要乱动电源。 二、复习提问:生活中哪些电子元器件是利用半导体制作出来的? 三、导入新课: 我们的生活中根据导电能力的强弱可以分成哪几种, 这节课我
 泰德半导体
泰德半导体
泰德半导体
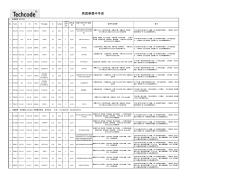
No. Type Vi Vo Fre Package Io ηmax OCP OTP SP 技术误 差 同类PIN对PIN产品型 号 适用产品范围 备注 1 TD1410 3.6~20 1.222~18 380KHz SOP-8 2A 95% Y ≤3% MPS1410/9141/ACT4060/A TC4012/FSP3126/ZA3020 等 便携式DVD、LCD显示驱动板。液晶显示器、液晶电视、数码相 框.电信ADSL.车载DVD/VCD/CD.GPS。安防等 TD1410采用CMOS工艺 /6寸晶圆。是一款高效率低损耗 ,工作稳定 ,性价比 很高使用面广的 DC/DC电源管理芯片。 3 TD1534 1~20 0.8~18 380KHz SOP8 2A 95% Y ≤2% MP1513 TD1513 路由器,便携式 DVD、机顶盒、平板电脑、笔记本电脑、 LCD显示 驱动板 .液晶