多波束测深系统已经成为海洋测量的主要设备之一。为了确保多波束测量的高精度、高效率等优点,在测量过程中就必须严格消除系统内部误差和各项外部影响因素。多波束系统的参数校正就是为消除系统内部误差而引入的误差改正的基本方法。波束角偏差是多波束系统内部误差,它是由于换能器基阵基元之间的物理相位与间距误差综合导致的,对整个声纳系统的水深测量与定位精度都有着重要的影响。但在通常的参数校正中,作业人员一般只进行多波束系统换能器横向偏差、纵向偏差以及定位系统的时间延迟、罗经艏向偏差的校正,很少关注波束角偏差的校正。然而波束角偏差是影响多波束系统测量精度的主要因素之一,严重时导致勘测数据出现沿测线方向的条带状伪地形,测量实时监控窗上出现很明显的凸凹伪地形。SIMRAD公司为EM系列多波束系统配置的Calibrate多参数校准软件对波束角偏差的校正十分有效。
波束角波束角偏差产生的原因
多波束系统声基阵误差主要包括基元物理相位误差和基元之间的间隔误差。可以通过调节接收机放大电路的相位补偿来实现物理相位误差的校正,但直接测量基元间隔误差就比较困难。物理相位误差和基元间隔误差使多波束系统设计波束角与实际形成波束角之间存在一个偏差,即波束角偏差。
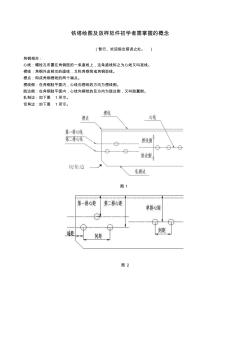
多波束系统的换能器接收基阵由多个并列的接收水听器基元组成。一般情况下,设换能器接收基阵是由x个基元组成,相邻之间的距离为di,误差为Δdi,换能器上第i号基元相对于第0号基元中心的距离为S(di)。
波束角波束角偏差对测量精度的影响
在多波束声学投射平面内,当接收声波的波束角存在偏差Δθ时,根据垂直参考系下的波束角和旅行时间计算测点的水深H和横向中心距离X,可得到:
式中,v0为换能器表层声速;v为各层的声速;dt为计算波束测点单程旅行时的微分;θ为波束角。由上式可以看出,当波束角存在偏差Δθ时,对定位精度和水深都有很大的影响。
(1)波束角偏差对定位精度的影响
由式可以看出,多波束系统波束角偏差直接影响着波束形成的实际位置,对多波束系统测量定位精度的影响是最直接的。
表1为水深100 m时,不同波束角在不同波束角偏差情况下对水深点横向距离的影响;图5为水深100 m,波束角偏差为0.2°时,不同波束角测量水深点横向距离的影响。由表1和图5看出,如果多波束系统波束角偏差为0.2°,在波束角60°时,引起的波束横向距离误差为1.4 m,只这一项就占IHOS-44标准中一级精度指标的70%,而波束角60°以外的波束引起的横向偏移就更大。
(2)波束角偏差对水深数据精度的影响
由式可以看出,多波束系统波束角偏差直接影响着测量的水深数据,引起测量海底的伪地形。当波束角存在偏差时,在海底平坦海区测量时,多波束系统的监控窗口显示的测量海底地形与声速剖面存在误差时显示的测量地形相似,会出现凹或凸的伪地形,但波束角存在偏差时监控窗口显示的测量地形外侧弯曲较严重,在波束角60°以内测量的地形较平坦,变形很小;波束角60°以外测量的地形变形严重,出现向下弯或向上翘的伪地形。当波束角偏差为负值时,边缘波束测量的水深值比中心波束测量的水深值大,出现凸的伪地形;波束角偏差值为正时,边缘波束的测量的水深值比中心波束测量的水深值小,出现凹的伪地形。在水深约为42 m的平坦海区,使用波束角偏差为0.72°的多波束系统,覆盖角150°,与双频测深仪单通道测量的水深数据比较,见表2。从表中看出,多波束中心波束测量的水深值与双频测深仪测量的水深值相差不大,而与波束角75°附近的波束测量水深值差都大于2 m,边缘波束测量的水深误差都大于IHOS-44规定的1%水深的精度标准。可见波束角偏差对边缘波束影响是很大的,而对中心波束附近的波束影响较小。
波束角借用横向参数校准软件对波束角偏差进行校正
波束角偏差可以借用换能器横向参数校准软件进行校正。但由于声速剖面数据误差、换能器横向偏差及波束角偏差都会引起测量的海底地形发生凹或凸的伪地形,所以在进行波束角偏差校正前,首先进行横向偏差校正。当换能器横向偏差校正好后,在一定水深的平坦海区(水深按照多波束系统测深要求选择),选择在南北、东西方向上布两条互相垂直的测线,线长不少于2 km,见图6。首先在两条测线交叉点附近用声速仪测量海水的声速剖面数据,并把测量的数据输入到系统工作站,然后匀速沿布设的两条垂直测线测量至少两次。图7为测量的两条垂直测线的立体图,从凹形伪地形看出该多波束系统存在较大的波束角偏差。
测量结束后,进入系统数据处理工作站,打开Calibrate参数校正软件,在垂直的两条测线上选择两条具有一定宽度的校正线,见图6。在横向偏差校正窗将1号校正线放在图6中①②③的位置来比较两条测线的水深数据。图4中蓝色且水平的数据是1号校正线的数据(即测线1中心波束附近的数据,受波束角偏差影响较小);红色且呈凹形形状的数据是测线2在①②③处的几个波束的数据,该数据受波束角偏差影响较大。由于受波束角偏差影响,两组数据没有重合在一起。这时可以调整校正窗口左侧的滑动条,使两组数据的中心波束数据重合在一起,见图9,这时滑动条上面显示的角度就是波束角偏差值。
重复上面的工作,再将1号校正线放在⑦⑧⑨,2号校正线放在①④⑦、③⑥⑨处,分别得到一个偏差值,取四个偏差值的平均数,就得到波束角的偏差值,把波束角偏差值输入系统工作站,在实际测量中就可实时进行数据的改正。为了印证波束角偏差校正的效果,可以在十字测线上再重新测两个来回,再按上面操作的步骤检查,如果校正线上的数据与边缘波束上的数据重合的比较好,说明偏差得到了校正,否则需要再重新校正。
波束角研究结论
波束角偏差是影响多波束系统测量精度的主要因素之一,它不但影响测量水深数据的精度,还会影响水深点的定位精度,特别是对波束角60°以外的边缘波束影响很大,严重时会导致测量的海底地形呈现凸或凹的伪地形。因此在多波束系统测量作业前,在进行传统参数校正项目的基础上,最好进行波束角偏差的校正。波束角偏差校正方法很多,借用SIMRAD公司为EM系列多波束系统配置的Calibrate多参数校准软件对波束角偏差进行校正,效果十分有效,大大提高了测量数据的精度。 2100433B

 基于小波束角超声测距的自适应式交通灯控制系统研究与设计
基于小波束角超声测距的自适应式交通灯控制系统研究与设计
 角钢概念解释
角钢概念解释