于是利用相同的谐振频率来实现激励所说陶瓷棒的复合振动模态,即一阶复合振动模态和二阶复合振动模态;在实测中,通过在10mm范围内改变陶瓷棒的高度和直径尺寸,出现了所述陶瓷棒的伸缩振动频率和弯曲振动模态振动频率的两个谐振频率,在这相同谐振频率的两种振动模态的共同激励作用下,该陶瓷棒顶端会形成一个椭圆运动,由此而制成多自由度压电陶瓷棒状微马达;
-

选择特殊符号
选择搜索类型
请输入搜索
多自由度压电陶瓷棒状微马达,所述复合激励方式是根据压电陶瓷棒定子具有的各阶弯曲振动模态和伸缩振动模态随着所述陶瓷棒的高度、直径和材料的变化以及金属匹配块的形状和材料的变化,一阶伸缩振动模态谐振频率和前两阶弯曲振动模态的谐振频率可能出现相同点
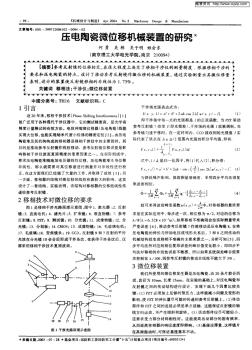
其特征在于:所述基于复合激励方式的压电陶瓷棒状微马达,有两种结构:
1)两个自由度的平面驱动器结构的压电陶瓷棒状微马达,利用一阶或二阶复合振动模态激励,陶瓷棒在两个端面的XZ面和YZ面内实现椭圆运动,其马达的结构是陶瓷棒⑴放入套筒⑵中,套筒⑵壁上嵌有橡胶环⑶,用于陶瓷棒的定位;将钢珠⑷放入套筒⑵上孔中,再放入弹簧⑸,并用螺栓⑹旋入套筒⑵上孔中,给弹簧⑸一个变形力,实现预紧力;定子⑺套入陶瓷棒⑴的另一端,并粘接牢固,便完成了马达的装配;马达驱动的平台分三层,上层⑻上表面是光滑的驱动面,下面是两个平行的导轨,中层⑼是一个"井"字形平台,上面是两个承接上层平台的导轨槽,下面是与上表面垂直的两个平行导轨,下层⑽是基础层,将马达和平台装入支架 ⑾,用螺栓⑿锁紧马达,并且将平台固定在支架上,实现将平台XY面内二维移动的目的;
2)三个自由度的球驱动器结构的压电陶瓷棒状微马达,其陶瓷棒在一阶或二阶复合振动模态下,在两个端面的XZ和YZ面内实现椭圆运动,并在一阶或二阶弯曲振动模态下,在XY内做圆摆运动,本三维运动微马达的陶瓷棒⑴ 放入套筒⑵中,套筒⑵壁上嵌有橡胶环⑶,用于陶瓷棒的定位;将钢珠⑷放入套筒⑵下孔中,再放入弹簧⑸,并用螺栓⑹旋入套筒⑵ 下孔中,使弹簧⑹变形,实现马达定子⑺的预紧力,定子⑺套入陶瓷棒⑴的另一端,并且粘接牢固,便完成了马达的装配;将马达和平台装入支架⑾,用螺栓⑿锁紧马达,并且将聚四氟乙烯环⒀放入支架的上槽中,上面放入大钢球⒁,在合适的激励电源下激励定子的复合振动模态,钢球就在XZ和YZ面内旋转,加上弯曲振动模态,使钢球⒁在XY面内旋转,因此实现了钢球⒁的三维驱动。
于是利用相同的谐振频率来实现激励所说陶瓷棒的复合振动模态,即一阶复合振动模态和二阶复合振动模态;在实测中,通过在10mm范围内改变陶瓷棒的高度和直径尺寸,出现了所述陶瓷棒的伸缩振动频率和弯曲振动模态振动频率的两个谐振频率,在这相同谐振频率的两种振动模态的共同激励作用下,该陶瓷棒顶端会形成一个椭圆运动,由此而制成多自由度压电陶瓷棒状微马达;
压电陶瓷马达是利用压电陶瓷材料激发超声波实现驱动的一种新型电机,具有低速下大力矩输出、无电磁干扰、静音操作、保持力矩大、响应速度快、结构简单等特点。
压电陶瓷片的特点是体积小而薄,耐振动、不易损坏、使用方便、灵敏度高、价格便宜。
您好,据我所知: 陶瓷辊棒价格是100,陶瓷辊棒,应用于玻璃陶瓷工业中的辊道窑。陶瓷辊棒的主要作用是传输陶瓷或玻璃产品,耐高温高热,需要常清理辊棒表面。目前主要应用广泛的陶瓷辊棒有刚玉辊棒(alumi...

 压电陶瓷微位移机械装置的研究
压电陶瓷微位移机械装置的研究
压电陶瓷微位移机械装置的研究
维普资讯 http://www.cqvip.com 维普资讯 http://www.cqvip.com
 微型压电陶瓷振动发电技术研究综述
微型压电陶瓷振动发电技术研究综述
微型压电陶瓷振动发电技术研究综述
维普资讯 http://www.cqvip.com 维普资讯 http://www.cqvip.com 维普资讯 http://www.cqvip.com 维普资讯 http://www.cqvip.com
目前广泛应用着的单泵单马达元件及系统是多泵多速马达传动中元件和系统的组成部分之一,与多泵多速马达等元件及其他执行元件相组合,可设计出很多新的系统,从而形成了新型的、完整的多泵多马达液压传动系统。本书在简要介绍目前广泛使用的液压元件及系统类型、原理、结构特点的基础上,主要介绍新型的液压传动即多泵多马达传动,以及一个转子对应多个定子或多个转子对应一个定子的液压泵和马达等新型元件。详细介绍了新研发的液压用多泵多速马达等元件的原理及结构,提出了新型的多泵多速马达、摆动多速马达等的符号和表示方法,并对新型液压传动进行了定义,还详细介绍了多泵多速马达元件、多泵多马达系统(主要包括单泵多速马达系统、多泵单马达系统、多泵多速马达系统、多泵单缸和多泵多缸系统等多种不同种类的新系统),以及多速马达的差动连接等新型元件、新型典型回路、新型液压系统和连接方式。
自由度轴(axis of freedom)是指框架可以绕它转动因而提供自由度的轴 。
机构自由度分析是机构结构学中的首要研究,是运动和动力分析的基础。多环耦合机构是新型的一类复杂机构,它的自由度分析缺乏系统的理论指导。本项研究旨在开拓空间多环耦合机构自由度研究的新方向,通过对关键问题展开深入研究,对现有的基于反螺旋的自由度理论进行创新和发展,从而建立系统的多环耦合机构的自由度原理。首先,对此类机构进行结构分析,采用机构分解或机构转换的思想,将多环耦合机构转换为多个简单单元体或并联机构来分析,建立耦合特性分析的理论依据;其次,基于螺旋理论对各单元体或分支进行运动和约束分析,建立过约束的数学描述;然后,采用几何分析法探讨输出件的自由度,并由此对原有的自由度公式进行修订或验证,确立确实可行的自由度计算公式。最后,再应用新建立的理论和公式,对多种不同多环耦合机构的自由度开展研究,通过仿真模拟,进行结果验证、并不断总结完善,使其形成一套系统的多环耦合机构的自由度分析原理。