风电机组并网起动文献

 风电机组电气安装
风电机组电气安装
风电机组电气安装
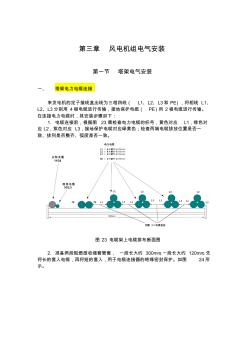
第三章 风电机组电气安装 第一节 塔架电气安装 一、 塔架电力电缆连接 来发电机的定子接线盒出线为三相四线( L1、L2、L3和 PE),将相线 L1、 L2、L3分别用 4根电缆进行传输,接地保护电缆( PE)用 2根电缆进行传输。 在连接电力电缆时,其安装步骤如下: 1. 电缆连接前,根据图 23需检查电力电缆的标号,黄色对应 L1,绿色对 应 L2,紫色对应 L3,接地保护电缆对应绿黄色;检查两端电缆排放位置是否一 致、排列是否整齐、弧度是否一致。 图 23 电缆架上电缆排布断面图 2. 准备两段阻燃型收缩套管套, 一段长大约 300mm,一段长大约 120mm,先 将长的套入电缆,再将短的套入,用于电缆连接器的绝缘密封保护。如图 24所 示。 图 24 阻燃型收缩套管 3. 将电缆的接头部分去皮,其线芯裸露的长度须比电缆连接器端的孔深稍 长一点,以保证电缆的铜导体完全插入连接器,紧
 风电机组用电缆
风电机组用电缆
风电机组用电缆
风电机组用电缆 -风力发电机组控制电缆 一、风力发电机组控制电缆产品用途 用于风力发电机组机舱内部,额定电压 450/750V 及以下控制系统,固定敷设,作控制、监控回路或保护线路控制信号传输线。其 中屏蔽控制电缆,可用于抵抗外部电磁场干扰和防止对外产生脉冲干扰。 二、风力发电机组控制电缆执行标准 Q/RFDL 16.4 —2009 三、风力发电机组控制电缆型号、名称 FDKVVRP 风力发电机组塑料绝缘屏蔽控制电缆 FDKVVR 风力发电机组塑料绝缘控制电缆 FDK EFR 风力发电机组橡胶绝缘控制电缆 四、风力发电机组控制电缆规格 型号 芯数 截面 FDKVVRP 2~37 2~7 0.5mm2~ 10mm2 16mm2~185 mm2 FDKVVR 2~37 2~7 0.5mm2~ 10mm2 16mm2~185 mm2 FDK EFR 2~5 25m