跟踪误差文献

 商砼误差
商砼误差
商砼误差
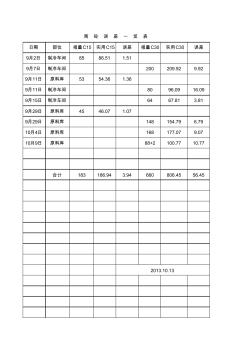
日期 部位 报量C15 实用C15 误差 报量C30 实用C30 误差 9月2日 制冷车间 85 86.51 1.51 9月7日 制冷车间 200 209.92 9.92 9月11日 原料库 53 54.36 1.36 9月11日 制冷车间 80 96.09 16.09 9月15日 制冷车间 64 67.81 3.81 9月29日 原料库 45 46.07 1.07 9月29日 原料库 148 154.79 6.79 10月4日 原料库 168 177.07 9.07 10月9日 原料库 88+2 100.77 10.77 合计 183 186.94 3.94 660 806.45 56.45 商 砼 误 差 一 览 表 2013.10.13
