杭州地铁1号线区间设计与施工难点研究文献

 杭州地铁1号线浅覆土盾构区间设计施工难点及处理
杭州地铁1号线浅覆土盾构区间设计施工难点及处理
杭州地铁1号线浅覆土盾构区间设计施工难点及处理
杭州地铁1号线盾构区间(红普路站-九堡站)由于穿越有害气体层而调整为浅覆土区间,论述在设计、施工中遇到的难点及处理办法,理论计算与工程实际紧密结合,对同类工程有参考意义。
 杭州地铁1号线工程概况
杭州地铁1号线工程概况
杭州地铁1号线工程概况
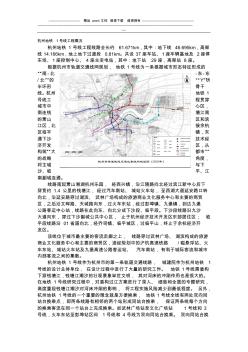
---------------------------- 精品 word 文档 值得下载 值得拥有 ---------------------------------------------- ------------------------------------------------------------------------------------------------------------------------------------------ ---- 杭州地铁 1号线工程概况 杭州地铁 1 号线工程线路全长约 61.671km,其中:地下线 46.695km,高架 线 14.166km,地上地下过渡段 0.81km。共设 37座车站、 1座车辆基地及 2座停 车场、 1座控制中心、 4座主变电站,其中:地下站 29座,高架站 8座。 根据杭州市轨道交通线网规划













