机电伺服系统
- 机电伺服系统 electromechanical servos 以电动机作为动力驱动元件的伺服系统。电动机是将电能转换为机械能的元件,功率范围宽,使用方便,容易控制,是应用最广的驱动元件(见电动执行元件)。机电伺服系统广泛应用于仪表、飞行控制、火力控制等各种领域。机电伺服系统按所用电机的类型又可分为直流伺服系统和交流伺服系统。伺服系统的性能和结构与电机类型和控制方式有很大关系。
-

选择特殊符号
选择搜索类型
请输入搜索
在交流伺服系统中,一般采用两相交流电动机作为执行部件。它的一个绕组是作为固定激磁用的,另一个绕组为控制绕组,两个绕组上电压的相位相差90°。两相交流电机工作可靠,交流放大器结构简单且没有零点漂移,加上测量元件又都采用交流电(例如旋转变压器),所以交流伺服系统简单可靠。但是交流电动机的效率较低,因此交流伺服系统一般仅用于100瓦以下的小功率场合。交流伺服系统的设计比直流伺服系统复杂得多,用于改善系统性能的校正装置(见控制系统校正方法)在结构上也比较复杂。2100433B
直流伺服系统适用的功率范围很宽,包括从几十瓦到几十千瓦的控制对象。通常,从提高系统效率的角度考虑,直流伺服系统多应用于功率在100瓦以上的控制对象。直流电动机的输出力矩同加于电枢的电流和由激磁电流产生的磁通有关。磁通固定时,电枢电流越大,则电动机力矩越大。电枢电流固定时,增大磁通量能使力矩增加。因此,通过改变激磁电流或电枢电流,可对直流电动机的力矩进行控制。对电枢电流进行控制时称电枢控制,这时控制电压加在电枢上。若对激磁电流进行控制,则将控制电压加在激磁绕组上,称为激磁控制。
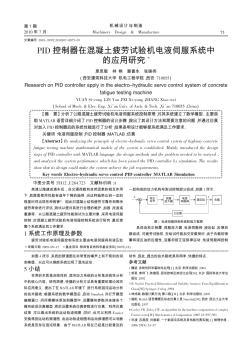
电枢控制时,反映直流电动机的力矩T与转速N之间关系的机械特性基本上呈线性特性(见图1)。图1中Vc1,Vc1是加在电枢上的控制电压,负斜率D为阻尼系数。电枢电感一般较小,因此电枢控制可以获得很好的响应特性。缺点是负载功率要由电枢的控制电源提供,因而需要较大的控制功率,增加了功率放大部件的复杂性。例如,对要求控制功率较大的系统,必须采用发电机-电动机组、电机放大机和可控硅等大功率放大部件。
激磁控制时要求电枢上加恒流电源,使电动机的力矩只受激磁电流控制。恒流特性可通过在电枢回路中接入一个大电阻(10倍于电枢电阻)来得到。对于大功率控制对象,串联电阻的功耗会变得很大,很不经济。因此激磁控制只限于在低功率场合使用。电枢电源采用恒流源后,机械特性上的斜率等于零,引起电机的机电时间常数增加,加之激磁绕阻中的电感量较大,这些都使激磁控制的动态特性较差,响应较慢。
伺服系统由控制器,功率驱动装置,电动机三部分组成。一、控制器控制器按照数控系统的给定值和通过反馈装置检测的实际运行值的差,调节控制量。二、功率驱动装置功率驱动装置作为系统的主回路,一方面按控制量的大小...
伺服系统用来精确地跟随或复现某个过程的反馈控制系统。又称随动系统。在很多情况下,伺服系统专指被控制量(系统的输出量)是机械位移或位移速度、加速度的反馈控制系统,其作用是使输出的机械位移(或转角)准确地...
伺服来自英文单词servo,指系统跟随外部指令进行人们所期望的运动,运动要素包括位置、速度和力矩。伺服系统的发展经历了从液压、气动到电气的过程,而电气伺服系统包括伺服电机、反馈装置和控制器。在20世纪...

 基于并行工程的机电伺服系统概念设计方法
基于并行工程的机电伺服系统概念设计方法
基于并行工程的机电伺服系统概念设计方法
概念设计是产品设计过程中最关键、最具创造性的阶段,概念设计执行得好坏在很大程度上决定了产品的质量,甚至整个设计的成败。将并行工程思想引入伺服系统的概念设计中,指出机电伺服系统解耦的关键因素是选择确定系统驱动装置。以小型化SIM卡滑车式写入机构为例,给出了机电伺服系统的概念设计过程模型。
 PID控制器在混凝土疲劳试验机电液伺服系统中的应用研究
PID控制器在混凝土疲劳试验机电液伺服系统中的应用研究
PID控制器在混凝土疲劳试验机电液伺服系统中的应用研究
分析了公路混凝土疲劳试验机电液伺服系统控制原理,对其系统建立了数学模型。主要借助MATLAB语言详细介绍了PID控制器的设计步骤,提出了其设计方法和需要注意的问题,并通过仿真对加入PID控制器后的系统性能进行了分析,结果表明设计能够使系统满足工作要求。
数控伺服系统是以机械位移为直接控制目标的自动控制系统,也可称为位置随动系统,简称为伺服系统。数控机床伺服系统主要有两种:一种是进给伺服系统,它控制机床各坐标轴的切削进给运动,以直线运动为主;另一种是主轴伺服系统,它控制主轴的切削运动,以旋转运动为主。伺服系统的控制方法主要分为开环、闭环和半闭环三种控制方法。它实际上是指伺服系统实现位置伺服控制的三种方式。
硬盘驱动系统里边就是个伺服系统,大家不要小看这个伺服系统,硬盘伺服系统里边高速旋转的时候,定位的精度是一个微米,在高速旋转的气流下,这实际上是扰动很大的,要求高精度。这个利润、产量都非常大,每年几百万套。
电液伺服系统又称跟踪系统,是一种自动控制系统,在这种系统中,执行元件能够自动、快速而准确地按照输入信号的变化规律而动作。同时,系统还起到将信号功率放大的作用。这种由电液元件组成的系统称为液压伺服系统。其特点如下:
(1)伺服系统是一个位置跟踪系统。输出位移自动地跟随输入位移的变化规律而变化,体现为位置跟随运动。
(2)伺服系统是一个功率放大系统。推动滑阀阀芯所需的功率很小,而系统的输出功率却可以很大,可带动较大的负载运动。
(3)伺服系统是一个负反馈系统。输出位移之所以能够精确地复现输入位移的变化。是因为控制滑阀的阀体和液压缸体固连在一起,构成了一个负反馈控制通路。液压缸输出位移,通过这个反馈通路回输给滑阀阀体,并与输入位移相比较。从而逐渐减小和消除输出位移和输入位移之间的偏差,直到两者相同为止。因此负反馈环节是液压伺服系统中必不可少的重要环节。负反馈也是自动控制系统具有的主要特征。