交流伺服系统在许多性能方面都优于步进电机··4文献

 5V_4相_5线步进电机_全新步进电机
5V_4相_5线步进电机_全新步进电机
5V_4相_5线步进电机_全新步进电机
5V_4相_5线步进电机_全新步进电机
 5V4相5线步进电机全新步进电机
5V4相5线步进电机全新步进电机
5V4相5线步进电机全新步进电机
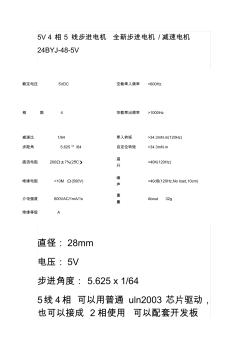
5V 4 相 5 线步进电机 全新步进电机 /减速电机 24BYJ-48-5V 额定电压 5VDC 空载牵入频率 >600Hz 相 数 4 空载牵出频率 >1000Hz 减速比 1/64 牵入转矩 >34.3mN.m(120Hz) 步距角 5.625° /64 自定位转矩 >34.3mN.m 直流电阻 200Ω±7%(25℃) 温 升 <40K(120Hz) 绝缘电阻 >10M Ω (500V) 噪 声 <40dB(120Hz,No load,10cm) 介电强度 600VAC/1mA/1s 重 量 About 32g 绝缘等级 A 直径: 28mm 电压: 5V 步进角度: 5.625 x 1/64 5线 4相 可以用普通 uln2003 芯片驱动, 也可以接成 2相使用 可以配套开发板