裂纹深度测量文献

 混凝土道路裂纹深度的超声检测
混凝土道路裂纹深度的超声检测
混凝土道路裂纹深度的超声检测
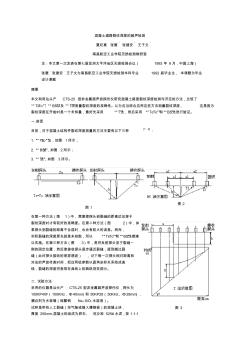
混凝土道路裂纹深度的超声检测 夏纪真 张雁 * 张建安 * 王子文 * 南昌航空工业学院无损检测教研室 注:本文第一次发表在第七届亚洲太平洋地区无损检测会议( 1993 年 9月,中国上海) 张雁 、 张建安 、 王子文为南昌航空工业学院无损检测本科专业 1992 届毕业生, 本课题为毕业 设计课题 摘要 本文利用汕头产 CTS-25 型非金属超声波探伤仪研究混凝土路面裂纹深度检测与评定的方法,比较了 “ Tc-To”、“ BS”以及 “ T”法测量裂纹深度的准确性。认为应当综合应用这些方法测量裂纹深度, 这是因为 裂纹深度在开始时是一个未知量,最好先采用 “T”法,然后采用 “Tc-To”和“BS”法进行验证。 一 .前言 目前,对于混凝土结构件裂纹深度测量的方法主要有以下三种 [1 ,2]: 1. “ Tc-To”法,如图 1所示; 2. “ BS”法,如图 2所示; 3. “ T”法
