选择特殊符号
选择搜索类型
请输入搜索
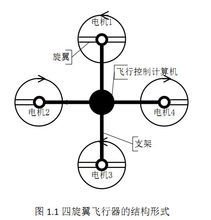
四旋翼飞行器采用四个旋翼作为飞行的直接动力源,旋翼对称分布在机体的前后、左右四个方向,四个旋翼处于同一高度平面,且四个旋翼的结构和半径都相同,旋翼1 和旋翼3 逆时针旋转,旋翼2 和旋翼4 顺时针旋转,四个电机对称的安装在飞行器的支架端,支架中间空间安放飞行控制计算机和 外部设备。
典型的传统直升机配备有一个主转子和一个尾浆。他们是通过控制舵机来改变螺旋桨的桨距角,从而控制直升机的姿态和位置。四旋翼飞行器与此不同,是通过调节四个电机转速来改变旋翼转速,实现升力的变化,从而控制飞行器的姿态和位置。由于飞行器是通过改变旋翼转速实现升力变化,这样会导致其动力不稳定,所以需要一种能够长期确保稳定的控制方法。四旋翼飞行器是一种六自由度的垂直起降机,因此非常适合静态和准静态条件下飞行。但是四旋翼飞行器只有四个输入力,同时却有六个状态输出,所以它又是一种欠驱动系统。
四旋翼飞行器的结构形式如图1所示,电机1 和电机3 逆时针旋转的同时,电机2 和电机4 顺时针旋转,因此当飞行器平衡飞行时,陀螺效应和空气动力扭矩效应均被抵消。与传统的直升机相比,四旋翼飞行器有下列优势:各个旋翼对机身所施加的反扭矩与旋翼的旋转方向相反,因此当电机1 和电机3 逆时针旋转的同时,电机2 和电机4 顺时针旋转,可以平衡旋翼对机身的反扭矩。
控制航行姿态的依据就是航姿传感器输出的信号。航姿传感器至少包括倾角传感器和角速度传感器。而倾角传感器可以利用三轴加速度传感器间接实现。既然是加速度传感器,那么它输出的信号表征的是当前三个轴向的加速度值,如果飞行器在空间中保持静止,那么加速度值通过简单的换算就可以得到真实的倾角参数。
但是飞行器在空间中是不可能时刻保持静止不动的,譬如在侧风的影响下,飞行器可能会向某一个方向偏离,那么此时即使飞行器确实保持水平,但三轴加速度传感器的输出仍会偏离中心值,造成控制核心的误判。
为避免这种情况的出现,则需要引入三轴角速度传感器和超声测距仪,利用三个轴向上的角速度和Z轴方向上的加速度以及实时高度的变化率对X、Y轴方向上的加速度进行校正,从而得出真实的倾角信息。传感器的输出信号经过模拟放大和模拟滤波之后送入AD变换电路转换为数字信号送入MCU(Microprocessor Control Unit ),由MCU进行包括但不仅限于kalman滤波等的数字信号处理,再依据MCU中的整套航姿控制算法得出控制量,送入专司电机控制的MCU中对电机进行实时控制,同时要避免各传感器间结果的冲突乃至矛盾。

飞行器设计与工程,飞行器动力工程,飞行器制造工程有什么区别和联系
基础差不多,但是专业课有所区别。飞行器设计与工程是关于飞行器的总体设计、气动外形之类的。飞行器动力工程是研究飞行器发动机的飞行器制造工程是研究将飞行器的设计转化为产品,也就是制造的
具体如下:航拍需要有航拍资质和飞行器操作资格证,到底从哪儿尚不知,中国的“相关部门”这个词用的太灵活了,哪里都能用。直接航拍算“黑飞”,万一影响了民航和军队那可是要负刑事责任的。
飞行动力学(AIRCRAFT DYNAMICS ) 是研究飞行器在空中的运动规律及总体性能的科学。所有穿过流体介质或者是真空的运动体,统称为飞行器。主要包括航天器、航空器、弹箭、水下兵器等。研究弹...

 四旋翼飞行器PID控制器设计
四旋翼飞行器PID控制器设计
四旋翼飞行器PID控制器设计
设计了四旋翼飞行器PID控制器,通过对位置坐标和姿态角PID控制器参数调节,使与位置和姿态相关的6个自由度的最终输出值与相应的期望值相等,达到设计要求。Matlab仿真实验结果表明:该PID控制器能有效地实现飞行器位置控制和姿态控制,且具有较强的鲁棒性。
四旋翼飞行器控制系统设计
四旋翼飞行器控制系统设计
本文对四旋翼飞行器的结构及特点进行了简单介绍,研究了基于四元数法的四旋翼飞行器姿态解算方法,同时对其进行了仿真分析,得出了有益结论,为进一步研究提高提供参考依据。
本书系统地介绍了机械手为主的先进控制器的设计和分析方法,是作者多年从事机器人控制系统教学和科研工作的结晶,同时融入了国内外同行近年来所取得的最新成果。本书是在原有《机器人控制系统的设计与MATLAB仿真》基础上撰写而成的。全书分为上下两册,作为下册,本册以电机、机械手、倒立摆、移动机器人和四旋翼飞行器为对象,共分13章,包括控制系统输出受限控制、控制输入受限控制、基于轨迹规划的机械手控制、机械手模糊自适应反演控制、机械手迭代学习控制、柔性机械手反演及动态面控制、柔性机械臂分布式参数边界控制、移动机器人的轨迹跟踪控制、移动机器人双环轨迹跟踪控制、四旋翼飞行器轨迹控制、基于LMI的控制系统设计、基于线性矩阵不等式的倒立摆TS模糊控制和执行器容错控制。