(1)波束指向灵活,能实现无惯性快速扫描,数据率高;
(2)一个雷达可同时形成多个独立波束,分别实现搜索、识别、跟踪、制导、无源探测等多种功能;
(3)目标容量大,可在空域内同时监视、跟踪数百个目标;
(4)对复杂目标环境的适应能力强;
(5)抗干扰性能好。全固态相控阵雷达的可*性高,即使少量组件失效仍能正常工作。但相控阵雷达设备复杂、造价昂贵,且波束扫描范围有限,最大扫描角为90°~120°。当需要进行全方位监视时,需配置3~4个天线阵面。
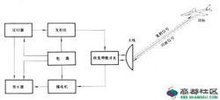
.. 相控阵雷达与机械扫描雷达相比,扫描更灵活、性能更可*、抗干扰能力更强,能快速适应战场条件的变化。多功能相控阵雷达已广泛用于地面远程预警系统、机载和舰载防空系统、机载和舰载系统、炮位测量、靶场测量等。美国"爱国者"防空系统的AN/MPQ-53雷达、舰载"宙斯盾"指挥控制系统中的雷达、B-1B轰炸机上的APQ-164雷达、俄罗斯C-300防空武器系统的多功能雷达等都是典型的相控阵雷达。随着微电子技术的发展,固体有源相控阵雷达得到了广泛应用,是新一代的战术防空、监视、火控雷达。
-