有源电力滤波器:结构·原理·控制
本书是"高效电能变换应用丛书"之一。随着电力电子技术应用的日益广泛,它在给人类生活带来快捷方便的同时,其负面效应也日益明显。电力电子装置已经成为主要的谐波干扰源而受到日益广泛的关注,而采用Satons滤波的方式抑制谐波已经成为一个必须面对的现实。
-

选择特殊符号
选择搜索类型
请输入搜索
本书是"高效电能变换应用丛书"之一。随着电力电子技术应用的日益广泛,它在给人类生活带来快捷方便的同时,其负面效应也日益明显。电力电子装置已经成为主要的谐波干扰源而受到日益广泛的关注,而采用Satons滤波的方式抑制谐波已经成为一个必须面对的现实。
有源滤波是用【运放】【晶体管】等元件【模拟】电路中的【电感】【电容】组成滤波电路,无源滤波器是指用电感,电容,电阻,组成的滤波电路。前者需要工作电压,后者是不需要工作电压就可以起到滤波作用。
有源滤波器与无源滤波器的区别1、有源滤波器是电子的,无源滤波器是机械的。2、有源滤波器是检测到某一设定好的谐波次数后抵消它,无源滤波器是通过电抗器与电容器的配合形成某次谐波通道吸收谐波。3、采用无源滤...
北京领步公司根据以往用户案例和经验给予以下回答:有源电力滤波器主要应用场合:1、配有变频设备等类似负载的场合2、配有不稳定负载的场合3、钢铁厂4、有色金属冶炼 5、港口机械 ...

 APF有源电力滤波器
APF有源电力滤波器
APF有源电力滤波器
有源电力滤波器 有源电力滤波器( APF:Active power filter )是一种用于动态 抑制谐波、补偿无功的新型电力电子装置, 它能够对不同大小和频率 的谐波进行快速跟踪补偿,之所以称为有源,是相对于无源 LC滤波 器,只能被动吸收固定频率与大小的谐波而言, APF可以通过采样负 载电流并进行各次谐波和无功的分离,控制并主动输出电流的大小、 频率和相位,并且快速响应,抵销负载中相应电流,实现了动态跟踪 补偿,而且可以既补谐波又补无功和不平衡。 中文名 有源电力滤波器 所属学科 物理 外文名 Active power filter 所属领域 电学 英文简称 APF 种 类 并联型和串联型 目录 1、概述 2、理论基础 3、工作原理 4、标准 5、三电平 ? 技术优势 ? 滤波器 ? 基本应用 ? 主要应用场合 ? 其他 ? 优势 6、性能说明 7、配件选型 1、概述
 有源电力滤波器装置的原理及特点
有源电力滤波器装置的原理及特点
有源电力滤波器装置的原理及特点
有源电力滤波器装置的原理及特点 安科瑞 王志彬 2019.03 有源滤波装置通过检测补偿对象的电压和电流, 得出与负载电流中的谐波电流大小相等、 方向相反的 补偿电流,从而使电网的电压、电流恢复为正弦波形。 有源电力滤波器具有如下特点: (1) 实现动态补偿,可对频率和大小均变化的谐波及变化的无功功率进行补偿,对补偿对象的变化有 极快的响应速度; (2) 有源滤波装置是一个高阻抗电流源,它的接入对系统阻抗不会产生影响,因此此类装置适合系列 化、规模化生产; (3) 当电网结构发生变化时装置受电网阻抗的影响不大,不存在与电网阻抗发生谐波的危险,同时还 能抑制串并联谐振; (4) 补偿无功功率时不需要储能元件,补偿谐波时所需要的储能元件不大; (5) 用同一台装置可同时补偿多次谐波电流和非整流倍次的谐波电流; (6) 当线路中的谐波电流突然增大时有源滤波器不会发生过载,并且能正常发挥作用,不需
如何提高电能质量和治理谐波是输配电技术中最迫切的问题之一,有源电力滤波器已成为解决这一问题的关键性技术。建立了三相三线制并联型有源电力滤波器的数学模型,把检测电源电流控制方式应用于并联型有源电力滤波器,通过仿真研究验证了此种控制方法可以有效地实现谐波的动态补偿,证明了该方法的可行性。
检测电源电流控制方式的等效电路图和结构图中Zs是电源内阻抗,ZHPF为高通滤波器阻抗。ic为指令电流参考值,GZ(s)为is与icL之间的传递函数;G(s)为校正环节,这种控制方式把产生谐振的传递函数GZ(s)包括在闭环内,选择适当的G(s)就可以抑制谐振,为了获得良好的补偿特性,G(s)应有较大的放大倍数,以增大系统的开环增益,但放大倍数太大会使系统不稳定,通常采用一阶惯性微分环节,其传递函数为G(s)=KTs/(1 Ts);GI(s)为指令电流运算电路的传递函数,放大倍数为-1;GA(s)为补偿电流发生器的传递函数,为时间常数很小的一阶惯性环节。得到:icL=iLic;Is(s)=GZ(s)·IcL(s);Ich(s)=G(s)·GI(s)·GA(s)·Is(s)。
通过电源电流控制方式实现谐波的检测,为了实现逆变器对谐波电流的补偿,需要控制逆变器使其输出的能够自动跟踪计算所得的参考电流,主要的控制方式有两种,分别是电流跟踪控制和电压控制。电流控制主要有四种,分别是周期采样控制、滞环比较控制、无差拍控制和三角载波线性控制。
1、周期采样控制:此控制方法主要是根据有源电力滤波器输出电流ic与参考电流icref的比较结果在采样脉冲的上升沿改变PWM脉冲的状态。
2、滞环比较控制:此控制方法是将补偿电流参考值icref与逆变器实际电流输出值ic之差Δic输入到具有滞环特性的比较器,通过比较器的输出来控制开关的开合,从而使逆变器输出电流实时快速的跟踪补偿电流参考值。
3、无差拍控制:此控制方法是利用前一刻的补偿电流参考值和实际电流值,计算下一刻的电流参考值及各种开关状态下逆变器的电流输出值,选择某种开关模式作为下一刻的开关状态,从而达到电流误差等于零。但由于无差拍控制方法存在系统误差与调制比对系统参数依赖性大、鲁棒性差、瞬态响应超调量大等缺点,因此在实际中不常用。
4 、三角载波线性控制:此控制方法是将检测电流环节得到的电流实际值ic与参考值icref之间的偏差与高频三角载波比较,所得到的PWM脉冲作为逆变器各开关器件的控制信号,从而在逆变器端得到所需波形的电流。
三角载波是电压型PWM逆变器中应用较多的一种电流控制方式,这种控制方式可以获得恒定的开关频率,装置安全性较高,鉴于此并联型有源电力滤波器中PWM变流器采用三角载波控制算法。
采用检测电源电流控制方式,逆变器采用三角载波控制算法,投入三相并联型有源电力滤波器后的系统仿真波形。在0.02s之前系统电流存在谐波并且电压和电流有相位差,0.02s后并联型有源电力滤波器投入使用,经补偿系统电流相位和电网电压相位基本一致,系统电流波形已接近正弦波,表明此控制策略的可行性。
萨顿斯有源电力滤波器通过电流互感器检测负载电流,并通过内部DSP计算,提取出负载电流中的
谐波成分,然后通过PWM信号发送给内部IGBT,控制逆变器产生一个和负载谐波电流大小相等,方向相反的谐波电流注入到电网中,达到滤波的目的。
指令电流检测电路的功能主要是从负载电流中分离出谐波电流分量和基波无功电流,然后将其反极性作用后发生补偿电流的指令信号。电流跟踪控制电路的功能是根据主电路产生的补偿电流,计算出主电路各开关器件的触发脉冲,此脉冲经驱动电路后作用于主电路。这样电源电流中只含有基波的有功分量,从而达到消除谐波与进行无功补偿的目的。根据同样的原理,电力有源滤波器还能对不对称三相电路的负序电流分量进行补偿。
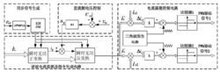
有源电力滤波器的主电路一般由PWM逆变器构成。根据逆变器直流侧储能元件的不同,可分为电压型有源滤波器(储能元件为电容)和电流型有源滤波器(储能元件为电感)。电压型有源滤波器在工作时需对直流侧电容电压控制,使直流侧电压维持不变,因而逆变器交流侧输出为PWM电压波。而电流型有源滤波器在工作时需对直流侧电感电流进行控制,使直流侧电流维持不变,因而逆变器交流侧输出为PWM电流波。电压型有源滤波器的优点是损耗较少,效率高,该电流在电感内阻上将产生较大损耗。
图 电压型有源滤波器
图 电流型有源滤波器
图 控制原理
所谓变结构,是指当系统的状态满足一定的条件时,系统的控制结构将发生变化。变结构控制(VSC)就是当系统状态穿越不同区域时,反馈控制的结构按照一定的规律发生变化,使得控制系统对被控对象的内在参数变化和外部环境扰动等因素具有一定的适应能力,保证系统性能达到期望的性能指标要求。
由于变结构控制具有抗扰性、自适应性、鲁棒性、实现容易等优点,因此变结构控制引起了人们的普遍重视。
变结构控制的研究始于 20 世纪 50 年代,前苏联学者 Emelyanov 等提出了变结构控制概念。随后 Utkin,Itkis 等学者总结并发展了滑模变结构控制理论,奠定了滑模变结构控制的理论基础。20 世纪 80 年代以来,随着确定切换函数的系统性方法的出现和微分几何理论的发展,变结构控制开始了新的发展阶段。近二十年来,随着计算机技术和大功率电子开关器件的发展,变结构控制的实现变得越来越容易,因此该方法受到了国内外控制界的广泛重视,现已成为自动控制领域的重要设计方法,并在工程应用中得到了推广应用。
变结构控制是指系统状态达到切换函数值,系统从一个结构自动地切换到另一个确定的结构(结构是一组数学方程描述的模型)。从本质上讲它具有开关切换特性,是一种控制系统的设计方法,适用于线性及非线性系统,包括控制系统的调节,跟踪,自适应及不确定等系统。它具有一些优良特性,尤其是对加给系统的摄动和干扰有良好的自适应性。
图 1对变结构控制作了大致的分类,变结构控制可分为两大类:
一类是不具有滑动模态的变结构控制,如Bang-Bang 控制、输出反馈变结构控制、多输入继电控制等。这一类控制只能称为变结构控制,虽然控制器可根据反馈量改变系统的结构使系统稳定于平衡位置,但系统不存在一个可滑动的面。
另一类是具有滑动模态(简称为滑模或滑模面)的变结构控制。这一类控制可称为滑模变结构控制或滑模控制,它的控制分为两个步骤:首先是系统从初始状态趋近于并到达滑模面,接着系统在滑模面上滑动并到达平衡位置。
变结构控制器都有一个切换面,如 x1,x2或者 x1 5x2,而具有滑动模态的切换面才称为滑模面。