一种平地机自动找平系统文献

 一种安装在平地机上的铧式犁
一种安装在平地机上的铧式犁
一种安装在平地机上的铧式犁
本文介绍了一种配备在GR100小型平地机上用于田地翻土的铧式犁及其犁体间距、犁体数量、入土隙角、偏移位置等主要技术参数的确定。
 三一平地机
三一平地机
三一平地机
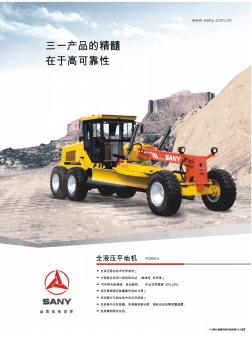
全液压平地机 PQ200CA ■ ■ ■ ■ ■ ■ ■ 全液压驱动技术世界首创; 行驶驱动采用三级齿轮传动 ,路线短 ,效率高; 可实现无级调速、自动换档, 作业效率提高 20%-25%; 液压摆架锁定装置操作轻松方便; 双回路行车制动技术安全双保险; 后机架内无变矩器、变速箱和驱动桥,拥有自动故障报警装置; 选用康明斯发动机。 0PQ20CA 三一产品的精髓 在于高可靠性 品 质 改 变 世 界 SANY MOTOR GRADER SERIES17三一重工路面机械产品系列 后退 R(自动档) (km/h) 0~31.6±3 前进 0~31.6±3D(自动档) (km/h) 一速 (km/h) 二速 (km/h) 三速 (km/h) 四速 (km/h) 6.3±1 6.3±1 9.0±1 9.0±1 11.0±1 11.0±1 14.0±1 14.0±1 手 动 档 一速 (km/