自动化喷涂的机器人装备文献

 机器人技术及焊接自动化
机器人技术及焊接自动化
机器人技术及焊接自动化
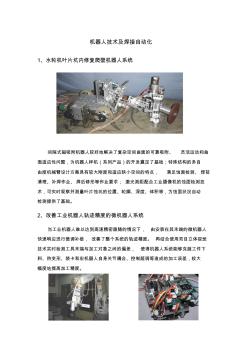
机器人技术及焊接自动化 1、水轮机叶片坑内修复爬壁机器人系统 间隙式磁吸附机器人较好地解决了复杂空间曲面的可靠吸附、 灵活运动和曲 面适应性问题,为机器人样机(系列产品)的开发奠定了基础;特殊结构的多自 由度机械臂设计方案具有较大刚度和适应狭小空间的特点, 满足蚀面检测、焊前 清理、补焊作业、焊后修形等作业要求; 激光测距配合工业摄像机的蚀面检测技 术,可实时观察并测量叶片蚀坑的位置、轮廓、深度、体积等,为蚀面状况自动 检测提供了基础。 2、改善工业机器人轨迹精度的微机器人系统 当工业机器人难以达到高速精密跟随的情况下, 由安装在其末端的微机器人 快速响应进行微调补偿, 改善了整个系统的轨迹精度。 再结合使用双目立体视觉 技术实时检测工具末端与加工对象之间的偏差, 使得机器人系统能够克服工件下 料、热变形、装卡和宏机器人自身关节耦合、控制超调等造成的加工误差,较大 幅度地提高加工精度。 3
 机器人自动化弧焊生产线研究
机器人自动化弧焊生产线研究
机器人自动化弧焊生产线研究
随着我国经济及自动化技术的快速发展,机器人自动化弧焊生产线中的应用越来越广泛,这在很大程度上减少了劳动力的使用,降低了焊接过程中失误的频率,为产品质量的提高及成本的降低提供了保障.基于此,本文章对生产线应用过程中的存在的问题及解决措施做出了详细介绍.