状态转换表文献

 基于状态转换的PLC程序模型构建方法
基于状态转换的PLC程序模型构建方法
基于状态转换的PLC程序模型构建方法
针对可编程逻辑控制器(PLC)程序在进行Nu SMV模型检测时需要手工对程序进行建模,不仅浪费人力且容易出错的问题,提出一种基于状态转移的PLC程序模型自动化构建方法。该方法首先分析结构化文本(ST)语言特性并解析ST程序为抽象语法树;其次,在抽象语法树基础上,根据不同的文法结构进行控制流分析生成控制流图;然后,通过数据流分析得到程序依赖图;最后,根据程序依赖图生成Nu SMV的输入模型。实验结果表明,所提方法实现了ST程序到Nu SMV输入模型的自动化构建,并且构建的Nu SMV输入模型既保留了ST程序的原有特性又符合Nu SMV模型检测工具输入的规范,与传统手工模型构建方法相比,提高了模型生成的效率和准确率。
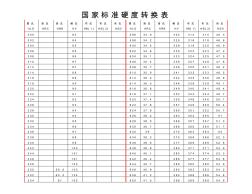 国家标准硬度转换表
国家标准硬度转换表
国家标准硬度转换表
国家标准硬度转换 表 里 氏 H L D 洛 氏 HR C 洛 氏 H RB 维 氏 H V 布 氏 HB [ 1 ] 布 氏 H B [ 2 ] 肖 氏 H S D 里 氏 H L D 洛 氏 HR C 洛 氏 H R B 维 氏 H V 布 氏 H B [ 1 ] 布 氏 H B [ 2 ] 肖 氏 H S D 3 0 0 8 3 5 9 6 3 3 . 9 3 2 2 3 1 4 3 1 5 4 6 . 3 3 0 2 8 4 5 9 8 3 4 . 2 3 2 5 3 1 6 3 1 8 4 6 . 6 3 0 4 8 5 6 0 0 3 4 . 5 3 2 8 3 1 9 3 2 0 4 6 . 9 3 0 6 8 5 6 0 2 3 4 . 8 3 3 0 3 2 2 3 2 3 4 7 . 2 3 0 8 8 6 6 0 4 3 5 . 1 3 3 3 3 2 4 3 2 5