一般直流电动机具有相同的工作原理和应用特性,而其组成是不一样的。除了电机本身外,前者还多一个换向电路,电机本身和换向电路紧密结合在一起。许多小功率电动机的电机本身是与换向电路合成一体,从外观上看直流无刷电动机与直流电动机完全一样。
直流无刷电动机的电机本身是机电能量转换部分,它除了电机电枢、永磁励磁两部分外,还带有传感器。电机本身是直流无刷电机的核心,它不仅关系到性能指标、噪声振动、可靠性和使用寿命等,还涉及制造费用及产品成本。由于采用永磁磁场,使直流无刷电机摆脱一般直流电机的传统设计和结构,满足各种应用市场的要求,并向着省铜节材、制造简便的方向发展。永磁磁场的发展与永磁材料的应用密切相关,第三代永磁材料的应用,促使直流无刷电机向高效率、小型化、节能方向迈进。
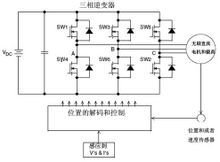
为了实现电子换向必须有位置信号来控制电路。早期用机电位置传感器获得位置信号,现已逐步用电子式位置传感器或其它方法得到位置信号,最简便的方法是利用电枢绕组的电势信号作为位置信号。
要实现电机转速的控制必须有速度信号。用获得位置信号相近方法取得速度信号,最简单的速度传感器是测频式测速发电机与电子线路相结合。
直流无刷电机的换向电路由驱动及控制两部分组成,这两部分是不容易分开的,尤其小功率用电路往往将两者集成化成为单一专用集成电路。
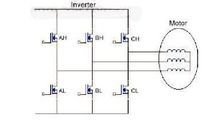
在功率较大的电机中,驱动电路和控制电路可各自成为一体。驱动电路输出电功率,驱动电动机的电枢绕组,并受控于控制电路。驱动电路已从线性放大状态转成脉宽调制的开关状态,相应电路组成也从晶体管分立电路转成模块化集成电路。模块化集成电路有功率双极晶体管、功率场效应管和隔离栅场效应双极晶体管等组成形式。虽然,隔离栅场效应双极晶体管价格较贵,但从可靠安全和性能角度看,选用它还是较合适的。
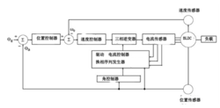
控制电路用作控制电机的转速、转向、电流(或转矩)以及保护电机的过流、过压、过热等。上述参数容易转成模拟信号,用此来控制较简单,但从发展来看,电机的参数应转换成数字量,通过数字式控制电路来控制电机。当前,控制电路有专用集成电路、微处理器和数字信号处理器等三种组成方式。在对电机控制要求不高的场合,专用集成电路组成控制电路是简单实用的方式。采用数字信号处理器组成控制电路是今后发展方向,有关数字信号处理器将在下面交流同步伺服电动机中介绍。
在微小功率范畴直流无刷电动机是发展较快的新型电机。由于各个应用领域需要各自独特的直流无刷电动机,所以直流无刷电动机的类型较多。大体上有计算机外存储器以及VCD、DVD、CD主轴驱动用扁平式无铁心电机结构,小型通风机用外转子电机结构,家电用多极磁场结构及内装式结构,电动自行车用多极、外转子结构等等。上述直流无刷电动机的电机本身和电路均成一体,使用十分方便,它的产量也非常大。为了满足大批量、低成本的市场需要,直流无刷电动机的生产必须要形成规模经济。因此,直流无刷电动机是一种高投入、高产出的行业。同时,我们应该考虑到市场也在不断地发展,如家用空调用电机正由3A转向3D,需要大量的中小功率的直流无刷直流电动机,研究和开发中小功率的直流无刷电动机也成当务之急。
(BLDCM)是在有刷直流电动机的基础上发展来的,但它的驱动电流是不折不扣的交流;无刷直流电机又可以分为无刷速率电机和无刷力矩电机。一般地,无刷电机的驱动电流有两种,一种是梯形波(一般是"方波"),另一种是正弦波。有时候把前一种叫直流无刷电机,后一种叫交流伺服电机,确切地讲是交流伺服电动机的一种。
无刷直流电机为了减少转动惯量,通常采用"细长"的结构。无刷直流电机在重量和体积上要比有刷直流电机小的多,相应的转动惯量可以减少40%-50%左右。由于永磁材料的加工问题,致使无刷直流电机一般的容量都在100kW以下。
这种电动机的机械特性和调节特性的线性度好,调速范围广,寿命长,维护方便噪声小,不存在因电刷而引起的一系列问题,所以这种电动机在控制系统中有很大的应用潜力。
电动机的定子绕组多做成三相对称星形接法,同三相异步电动机十分相似。电动机的转子上粘有已充磁的永磁体,为了检测电动机转子的极性,在电动机内装有位置传感器。驱动器由功率电子器件和集成电路等构成,其功能是:接受电动机的启动、停止、制动信号,以控制电动机的启动、停止和制动;接受位置传感器信号和正反转信号,用来控制逆变桥各功率管的通断,产生连续转矩;接受速度指令和速度反馈信号,用来控制和调整转速;提供保护和显示等等。
由于无刷直流电动机是以自控式运行的,所以不会象变频调速下重载启动的同步电机那样在转子上另加启动绕组,也不会在负载突变时产生振荡和失步。
中小容量的无刷直流电动机的永磁体,多采用高磁能积的稀土钕铁硼(Nd-Fe-B)材料。因此,稀土永磁无刷电动机的体积比同容量三相异步电动机缩小了一个机座号。
近三十年来针对异步电动机变频调速的研究,归根到底是在寻找控制异步电动机转矩的方法,稀土永磁无刷直流电动机必将以其宽调速、小体积、高效率和稳态转速误差小等特点在调速领域显现优势。
无刷直流电机因为具有直流有刷电机的特性,同时也是频率变化的装置,所以又名直流变频,国际通用名词为BLDC.无刷直流电机的运转效率,低速转矩,转速精度等都比任何控制技术的变频器还要好,所以值得业界关注.本产品已经生产超过55kW,可设计到400kW,可以解决产业界节电与高性能驱动的需求。