

纺织电子产品诸如电子清纱器、纱疵分级仪等均有络筒机车速自适应功能。所谓络筒机车速自适应是指络筒机车速在其速度范围内变化时,纺织电子设备能随之变化,提供标准采样信号,或计算出定长值。通常自适应的方法有两种:一是利用软件计算,通过霍尔磁钢传递转圈信号,按照络筒机筒子周长除以磁钢传递的周期信号计算出车速,车速变化采样信号随之改变;二是采用硬件跟踪,该方法实时性更好。本文介绍的硬件方法基于锁相环技术的自动跟踪,以实现对采集信号频率的自动跟踪和系统采集速率的自动变换。
1. 锁相环结构及原理
1
锁相环的意义是相位同步的自动控制,能够完成两个电信号相位同步的自动控制闭环系统叫做锁相环,英文缩写PLL。它广泛应用于广播通信、频率合成、自动控制及时钟同步等技术领域。锁相环主要由相位比较器(PD,亦称鉴相器)、压控振荡器(VCO)、低通滤波器(U)F)三部分组成,锁相环原理图见图1所示。

其基本原理如下:压控振荡器的输出玑接至相位比较器的一个输入端,其输出频率的高低由低通滤波器上建立起来的平均电压仉大小决定。施加于相位比较器另一个输入端的外部输入信号阢与来自压控振荡器的输出信号玑相比较,比较结果产生的误差输出电压‰正比于阢和以两个信号的相位差,经过低通滤波器滤除高频分量后,得到一个平均值电压玑。仉朝着减小VCO输出频率和输入频率之差的方向变化,直至VCO输出频率和输入信号频率获得一致。这时两个信号的频率相同,两相位差保持恒定(即同步),实现频率自动跟踪和相位锁定。当锁相环人锁时,它还具有“捕捉”信号的能力,VCO可在某一范围内自动跟踪输入信号的变化,如果输人信号频率在锁相环的捕捉范围内发生变化,锁相环能捕捉到输入信号频率,并强迫VCO锁定在这个频率上。锁相环应用非常灵活,如果输人信号频率^不等于VCO输出信号频率五,而要求两者保持一定的关系,例如比例关系或差值关系,则可以在外部加入一个运算器,以满足不同工作的需要。普通络筒机车速由于环境、人为因素等条件原因,车速不可能保持恒定不变,用锁相环技术恰好解决了这个问题。
2. 车速自适应设计方法
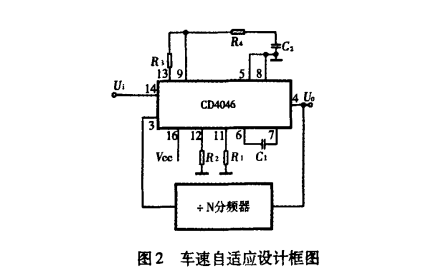
采用集成锁相环CD4046和÷N分频器构成车速自适应系统,络筒机传感器信号经过N倍频后送给CPU,作为纱线采样和定长的依据。图2为车速自适应设计框图。
CD4046是目前国内外最具代表性也是最常见的CMOS锁相环集成电路,其特点是电源电压范围宽(3V一18V),输入阻抗高(约100Mfl),动态功耗小,在中心频率五为10kHz下功耗仅为600斗W,属微功耗器件。CD4046的引脚排列采用16脚双列直插式,各引脚功能和内部原理框图见图3。
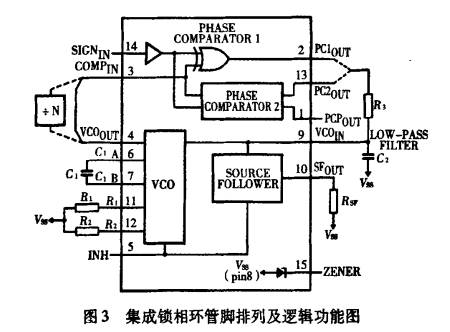
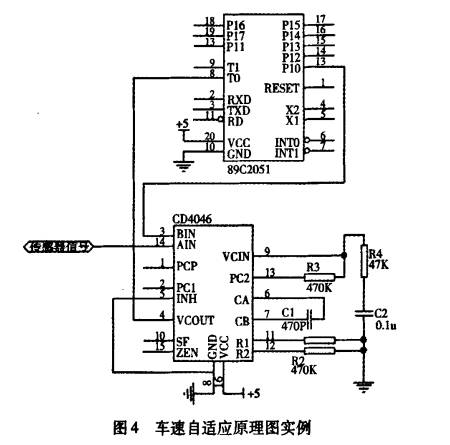
从内部电原理框图可以看出,CD4046主要由相位比较器I、Ⅱ、压控振荡器(VCO)、线性放大器、源跟随器、整形电路等部分构成。CIM046工作原理如下:输入信号配从14脚输入后,经放大器A,进行放大、整形后加到相位比较器I、Ⅱ的输入端,图3开关拨至2脚,则比较器I将从3脚输入的比较信号玑与输入信号阢作相位比较。从相位比较器输出的误差电压%反映出两者的相位差。‰经飓、R。及C:滤波后得到一个控制电压玑加至压控振荡器VCO的输入端9脚,调整VCO的振荡频率五,使正迅速逼近信号频率上。VCO的输出又经除法器再进入相位比较器I,继续与配进行相位比较,最后使得五=工,两者的相位差为一定值,实现了相位锁定。若开关K拨至13脚,则相位比较器Ⅱ工作,过程与上述相同,不再赘述。将霍尔传感器送来的转圈信号接在信号输入脚(14脚),VCO的输出经由一除法器(可采用计数器完成)进行N分频后,再送至相位比较器I,并进而与K进行相位比较,最后使五‘=正,二者的相位差恒定,从而实现锁相。由于工’=f:/N乇,可推得五=Nf,,表明:尽管从局部看使用除法器完成的是分频,但就锁相环整体而言却是实现N倍频。÷N分频器可用BCD加法计数器CD4518,也可选用4522、669、8046等可编程四位二进制计数器,实际工作中,考虑到印制板面积因素,还可采用CPU内部定时计数器完成,如图4所示。
用CIM046与÷N分频器构成的倍频电路,刚开机时灰可能不等于正,假定五<Z,此时相位比较器Ⅱ输‰为高电平,经滤波后玑逐渐升高使VCO输出频率正迅速上升以增大值至五=六,如果此时配滞后玑,则相位比较器Ⅱ输出%为低电平。‰经滤波后
得到的玑信号开始下降,这就迫使VCO对五进行微调,最后达到f2/N=工 ,并且五与五的相位差△‘P=0。,进入锁定状态。如果此后五又发生变化,锁相环能再次捕获五,使五与工相位锁定。
3. 外围元件参数选择
对该系统而言,锁相环外围元件的参数选择是个难点,要根据具体情况参考CD4046使用手册选定。CD4046锁相环采用的是RC型压控振荡器,必须外接电容C。和电阻R。作为充放电元件。当PLL对跟踪的输人信号的频率宽度有要求时还需要外接电阻恐。由于VCO是一个电流控制振荡器,对定时电容C。的充电电流与从9脚输入的控制电压成正比,使VCO的振荡频率亦正比于该控制电压。当VCO控制电压为0时,其输出频率最低;当输入控制电压等于电源电压VDD时,输出频率则线性地增大到最高输出频率。VCO振荡频率的范围由尺。、尺:和c,决定。由于 通常,最佳的取值是R。的阻值为恐的10%~30%,它的充电和放电都由同一个电容C。完成,故它的输出 这样可以消除过冲和振荡,并能有较快的工作速度。波形是对称方波。按照中心频率五和R,、C,的关系 环路跟踪较快变化的输入频率时,如果T过长,会引起曲线首先选定R,、c,值,再按照频率补偿关系确定R:。 过度的延迟;如,r过小,则引起压控振荡器输出频率的以小型络筒机GU029为例,假设0.1 mln采一个 反常变化。一般取C2=0.1妒,R3=470 kll,R4=样,则倍频500倍,输出频率范围13.35 kHz。40 kHz,47 kΩ即可。
低通滤波器由R,、R¨c2组成,其时间常数T=(R,+尺。)c:,参数选择应折衷在既要避免环路进人自激,又要保证对输人频率的变化有合理的响应速度。通常,最佳的取值是R。的阻值为恐的10%~30%,这样可以消除过冲和振荡,并能有较快的工作速度。环路跟踪较快变化的输入频率时,如果T过长,会引起过度的延迟;如,r过小,则引起压控振荡器输出频率的反常变化。一般取C2=0.1妒,R3=470 kll,R4=47 kΩ即可。5脚INH为“1”时停振,为“0”时起振,如络筒机始终要求给出车速自适应信号,将5脚接地即可。
4. 结语
R2/RI=8,按标称值屁2取作470 k1)即可。 本文阐述了基于锁相环CD4046的络筒机车速自低通滤波器由R,、R¨c2组成,其时间常数T= 适应设计方法。通过系列产品的研制开发及应用,证(R,+尺。)c:,参数选择应折衷在既要避免环路进人自 明该方法实时性好,稳定性高,性能可靠,完全符合纺激,又要保证对输人频率的变化有合理的响应速度。 织电子产品长期连续正确采样、定长的要求。
热点推荐:
♡
♡♡♡
编辑:纺机网
觉得不错,请点赞↓↓




