
提出一种新型清仓破拱系统,可良好应用在恶劣工况中。现对该系统的工作原理、结构以及载荷受力进行说明及分析。
0引言目前用于存储散装物料的筒仓主要有以下 3 种结构:
1 新型清仓破拱系统结构及工作原理图
1 为仓壁结构示意图,图 2 为新型清仓破拱系统结构示意图,清仓破拱系统主要由开式螺旋输送机构组成的自转系统及销齿传动机构组成的公转系统构成。 其中开式螺旋输送机构主要包括自转驱动电机、回转轴承、螺旋杆、轴承等;销齿传动机构主要包括公转驱动电机、驱动齿轮、销轴环、行走轮、行走导轨等。 在销齿传动机构上方筒仓仓壁设置一伞状保护檐将销齿传动机构遮住,保证物料不会将该机构掩埋;螺旋输送机自转电机安置在筒仓中心,下部通过回转支撑连接在筒仓底部,电机上方安置一伞形保护帽以保证物料不会落到电机旋转区域;输送机另一侧支撑轴承与销齿传动机构的销轴环上部相连接。图 12仓壁结构示意图1. 开式螺旋输送机构
2. 销齿传动机构图
 1 23456 7 8 9 10 11 12
1 23456 7 8 9 10 11 12
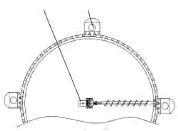
2 破拱系统结构示意图
1. 仓壁 2. 公转驱动电机 3. 驱动齿轮 4. 销轴环 5. 行走轮 6. 行走导轨 7. 出料口 8. 仐形保护帽 9 自转驱动电机 10. 回转轴承11. 螺旋杆 12. 轴承 该清仓破拱机构运行时,先开启自转系统,自转驱动电机带动螺旋杆转动,物料在螺旋推力作用下从螺旋处沿切线方向从仓壁向中心运动,物料从筒仓底部设置的出料口输出, 进料与出料方向在水平面呈 90°。 然后启动销齿传动机构,公转驱动齿轮带动安装在销轴环上的行走轮在行走轨道上滚动。 轴承连接螺旋杆,底部与销轴环相连。自转系统与公转系统相互配合工作,即可实现筒仓清仓破拱、输出物料的作用。 运行停止时先停止公转系统,再停止自转系统。新型清仓破拱系统优点2(1)销齿传动机构作为公转系统可以很好地适应筒仓粉尘大、无法良好润滑、重载荷低转速的恶劣工况,如果遇到仓储空间大,物料料位高的工况,可安装多个齿轮驱动来增加输出力矩。 有效地解决了第 3 种储煤仓内清仓破拱系统的局限性: 载荷较重时公转驱动打滑、空转等问题;筒仓容积较大,仓内物料料位较高或满仓时,物料压实螺旋机导致螺旋机自转公转驱动困难等问题;物料堆放时间长或物料含水量较大,物料黏连在一起时导致螺旋机公转阻力较大等问题;(2)新型清仓破拱系统配套的筒仓其出料口设置在底部,筒仓仓壁为圆柱形,仓壁下方伞状保护檐将销齿传动机构遮住,开式螺旋输送机紧邻出料口,筒仓内的物料是通过设在筒仓屋顶中部的来煤带式输送机经旋转桥架、配煤带式机及犁式卸料器将煤呈环状均匀卸入煤仓内。 这种设计方式使得物料进出形式为先进先出式,在开式螺旋输送机的自转与公转带动下将物料均匀推送至各个出料口。 有效地避免了第 1 种筒仓中物料长期不流动造成的板结、卸料困难等现象;避免了第 2 种筒仓中锥形底占用容积较大以及对物料体积的局限性。 同时在土建以及机械造价方面都比上述 3 种筒仓相对较低;(3)该新型清仓破拱机构配套电缆简单方便,自转电机只是绕着圆心转动,配套电缆转动幅度减小,安装时的技术难度和安全风险性也大大减小。 而销齿传动机构只需在齿轮驱动上的电机安装电缆,齿轮驱动电机固定在仓壁一侧,所以电缆线按固定式正常安装即可。 有效避免出现第 3 种筒仓清仓破拱系统中自转、公转系统驱动电机及其配套电缆作大半径回转运动时存在的不便与安全隐患;(4)当遇到物料凝结,起拱,输送机公转阻力较大时,可利用销齿传动转速可控的特点,先将输送机自转系统启动,破除自转范围内部分凝结起拱处,再进行步进式公转,即公转一定角度停止,自转破除该凝结起拱处再继续进行公转,直到所有凝结起拱处全部破除,既而正常运行。
3 新型清仓破拱系统受力分析
因该清仓破拱系统在国内并无相关制作安装标准,其运行时的受力分析需重新设计计算。 针对物料高处落下、满仓状态下清仓破拱系统深埋启动时受力问题进行详细分析计算。3.1 物料高处落下对设备冲击力物料高处落下对设备的冲击力主要存在于螺旋输送机受载荷部分的螺旋面和螺旋轴上,假设物料从仓顶落下,下落高度为 H,物料密度为 ρ,物料体积为 V,螺旋面螺旋升角为 θ。根据动能定理求出物料从高处落至接触面未发生碰撞时的速度v0=ρ2gnH假设物料落至接触面后与接触面作用时间为Δt,根据冲量定理可求出物料对作用面的冲击力式中v—作用过程中物料平均速度,m/s;m—物料的质量,kg;vt—物料与接触面作用完成后的速度,m/s;d—物料与接触面作用时质点的位移,mm。对螺旋面的冲力F′=Fcos θ若已知物料与钢板接触面积 S,则可求出物料对钢管以及螺旋面的压强 p=F/S。 该压强可以作为螺旋机架选材时参考条件之一。3.2深埋启动时螺旋输送机受力分析筒仓内的物料是通过设在筒仓屋顶中部的来煤带式输送机经旋转桥架、配煤带式机及犁式卸料器将煤呈环状均匀卸入煤仓内,所以当筒仓内物料料位较高时,其密度均匀,对仓底螺旋机的载荷也均匀。 因物料只对螺旋杆有作用力,现对螺旋杆在静止时和运动时分别作受力分析。
(1)螺旋杆自转或静止时载荷分析在筒仓料位高度一定的前提下,螺旋杆自转或静止时,受到的载荷均为螺旋杆接触面范围内物料的重力G=ρS1hgn式中 S1—螺旋机投影面的面积;h—物料料位高度。假设螺旋杆自转或静止时主要受到物料对螺旋杆的均布载荷 q、均布载荷作用长度为 b,即 G=qb;电机侧以及销轴环对杆的支反力 FA、FB。设螺旋杆长度为 l,载荷左端离 A 点电机侧距离为 a,其受力分析如图 3(a)所示。由图 3(a)可以看出,筒仓料位高度大于螺旋杆高度时,螺旋杆在煤堆中处于受力平衡状态。 根据 Y轴方向受力平衡及力矩平衡方程可分别求出支反力
FB= qb (a+ 1 b)l 2FA= qb (l-a- 1 b)l 2
对于 AM 段,其剪力、弯矩方程分别为
FS(x)= qb (l-a- 1 b)l 2
M(x)= qb (l-a- 1 b)xl 2(0≤x<a)
FS(x)= qb (a+ 1 b)
M(x)= qb (a+ 1 b)x(0≤x<l-a-b)
对于 MN 段,螺旋杆受到一均布载荷的作用,其剪力、弯矩方程分别为
FS(x)= qb (l-a- 1 b)-qx(0≤x≤b)
M(x)= qb (l-a- 1 b)x- 1 qx2- 1 qa2(a≤x≤a+b)
由剪力弯矩方程可以看出:AM 段、NB 段螺旋杆剪力 FS 为一固定值,在剪力图(见图 3(b))上表示为一条直线,弯矩 M 为一次方程,在图 3(c)上表示为斜线;MN 段螺旋杆剪力 FS 为一次方程,剪力图上表示为一条斜线,弯矩为二次方程,弯矩图上表示为抛物线。图 3 螺旋杆的受力、剪刀、弯矩图由剪力、弯矩图可以看出,在螺旋杆两侧其剪力最大,在均布载荷 MN 段必然存在剪力为 0 的点,即FS=0,此时,螺旋杆弯矩最大。 该弯矩称为该螺旋杆的极弯矩值。
(2)螺旋杆公转时载荷分析螺旋杆驱动力来自于销齿传动机构中齿轮驱
F= qb (a+ 1 b)+ M +f式中f—销齿环行走的滚动摩擦力;F-f—支撑轴承径向载荷。螺旋杆接触面径向载荷力(包括电机、联轴器和回转支撑)
F ′=pb- pb (a+ 1 b)- M
回转支撑的摩擦阻力距
M= μD0 (NG+NM+NH)
式中μ—回转支撑装置滚动体与滚动轨道之间的摩擦系数;D0—回转支撑装置轨道中心的直径,m;NG—轴向载荷,其数值等于垂直方向上电机侧的支反力 FA,N;NM—倾斜力矩,垂直方向受力平衡,所以力矩为 0;NH—径向载荷, 其数值等于水平方向电机侧压力 F ′,N。销齿环行走的滚动摩擦力f=μ1FB式中 μ1—行走轮与轨道之间的滚动摩擦系数;FB—垂直方向支撑轴承侧的支反力,N。由上述数据可作出水平方向上均布载荷 q 下的剪力弯矩方程及剪力弯矩图。对于 AM 段,其剪力、弯矩方程分别为圆周运动,可看做螺旋杆在回转运动中处于受力平衡状态,假设螺旋杆 A、B 点固定,其受力分析如图 4(a)所示。经过推导可求得驱动齿轮传递的驱动力对于 MN 段,螺旋杆受到一均布载荷的作用,其剪力、弯矩方程分别为
FS(x)=pb- pb (a+ 1 b)- M -qx (0≤x≤b)l 2
M(x)=[pb- pb (a+ 1 b)- M ]x+M- 1 px2- 1 pal 2 l 2 2(a≤x≤a+b)对应剪力、弯矩图如图 4(b)、图 4(c)所示。由图 4 可以看出,在螺旋杆两侧其剪力最大,在均布载荷 MN 段必然存在剪力为 0 的点,即 FS=0,如图上虚线位置,此时,螺旋杆弯矩最大,该弯矩称为该螺旋杆的极弯矩值。 螺旋杆在选择时应满足螺旋 面、螺旋轴的剪力弯矩要求,联轴器、电机、支撑轴承的径向载荷要求;回转轴承的径向、轴向载荷要求等,因考虑螺旋杆静止时受的垂直方向的力、公转时受到水平方向力的合力,该合力、合弯矩等,均可由平行四边形法则求出。
4、结语
本文提出一种新型筒仓内清仓破拱系统,该系统是由开式螺旋输送机构组成的自转系统及销齿传动机构组成的公转系统两部分组成。设备运行时,销齿传动机构驱动齿轮带动开式螺旋输送机构进行公转运动,开式螺旋输送机构自转电机带动螺旋杆进行自转运动,2 种运动相结合可实现筒仓清仓破拱任务。该系统可以很好地适应了煤仓粉尘大、无法良好润滑、重载荷低转速等工况的特点,可以运用在筒仓直径大,仓内料位高,筒仓环境恶劣等工作环境,有效地解决了市面上筒仓运作时的种种问题。 将现场所需数据代入理论计算参考相关文献可以计算出实际运用载荷,可选出相关配件型号等。该系统目前国内外尚数首例,在相关行业极具推广价值。
文章来源:www.hctsj.com
原文地址:www.tishengjixie.com/product/chuizhitsj..html




